
マツダのAWDシステム「i-ACTIV AWD」を旭川のテストコースで試乗する機会が2015年2月にあった。ウインターテストドライブのチャンスである。試乗車はデミオ、アクセラ、アテンザ、CX-5、そしてCX-3とスカイアクティブが勢ぞろいした試乗会だ。<レポート:髙橋 明/Akira Takahashi>

マツダのi-ACTIV AWD(アイ・アクティブ・エーダブリュディ)の特徴はどんな場面でも、タイヤのグリップを確保するオンデマンド式AWDであり、さらに燃費にも配慮したAWDである、という点だ。
オンデマンド式AWDは近年の流行最先端で、センターデフを持たない構造をしている。またパートタイム式のように、駆動方式を変更するアナログ・タイプでもない。状況によってAWDが必要とされるときに必要な分だけトルクを配分するのがオンデマンド式と呼ばれ、マツダはこのタイプをさらに一歩進めた制御を行なったものとしている。
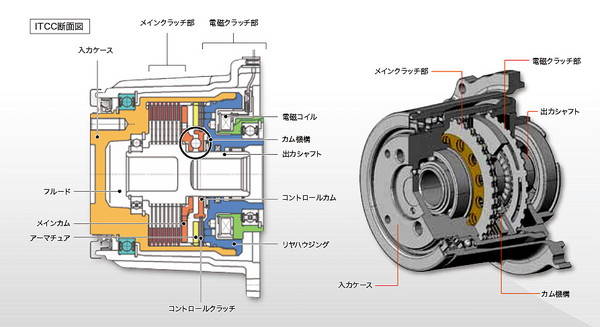
基本構成はFFベースでフロントデフからトランスファーを介し、リヤへトルクを伝える。リヤデフには電子制御式、湿式多板クラッチのカップリングで前後トルクのコントロールをしている。ハード部品はJTEKTを採用し、マツダが制御開発を行なっている。推測だがJTEKTのITCC(Intelligent Torque Controlled Coupling)をベースにステアリング・トルクセンシングを追加し、制御マップをオリジナルで作成しているのではないだろうか?
オンデマンド式は、フォルクスワーゲン、アウディをはじめ多くのメーカーが採用を始めている最新の技術、考え方で、車両安定を主目的としたものだ。アウディクワトロやスバルのAWDなどセンターデフをもつフルタイムAWDはスポーツドライブする際に、車両の安定と安心が得られるが、最新のオンデマンドAWDも同様のコンセプトが実現できるようになってきているのだ。一方ベーシックな量販タイプにも採用があるアクティブ・オンデマンド式は、滑りを感知してからAWDへと変わるタイプで、AWDの考え方としてパッシブなのが一般的だ。
マツダは最新のアクティブ・オンデマンド式としたうえで、さらに制御面でも他を凌ぐ緻密な制御を実現し、ドライバーに不安を感じさせないAWDとして搭載している。そして、オンデマンド式のキモとなるのはセンシングデータの解析で、多くの情報を得ることから始まる。
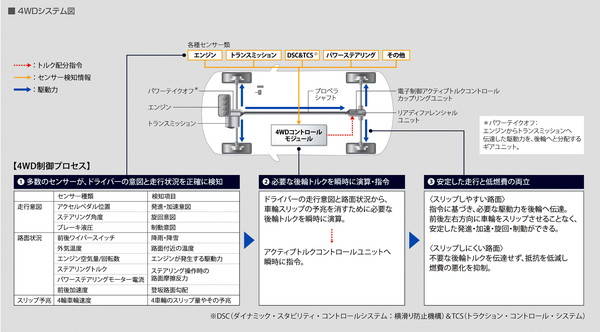
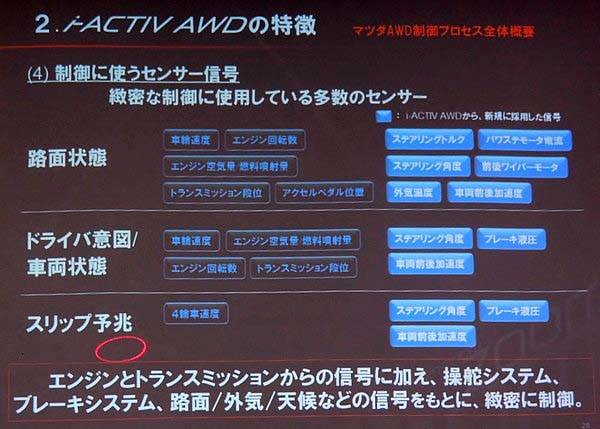
マツダがセンシングしているものは主に、スリップ比(車体速度とタイヤ回転(タイヤ速度)から算出できる、速度とタイヤスリップ量の比率)、外気温度、前後加速度、ステアリング舵角、ステアリングコラムトルク(反力)、パワーステアリングモーター電流、前後輪回転差をモニターし、安心、安全へとつながる制御をしている。
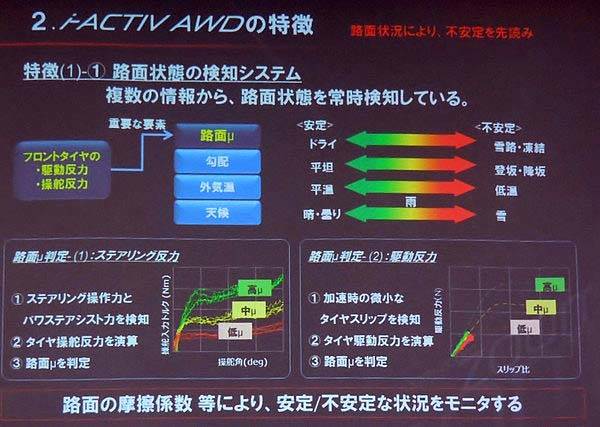
では、どこにその特徴があるのか、まずスタディしよう。代表的な特徴は「不安定な状況に備える制御」と「状況急変に対するスリップ予防制御」の2つで代表される。最初の「不安定な状況に備える制御」では、路面状態の検知システムにより、不安定を先読みする。路面のμからフロントタイヤの駆動反力、操舵反力を見ている。
その状態の時にドライバーの操作として、ステアリング操作角、アクセルペダル開度、ブレーキ減圧はどのようになっているか、そして車両状態として、車両速度、前後加速度、横Gはどの程度かをセンシング。こうして得たデータをもとに最適な前後トルク配分を常に変化させながらコントロールし、車両の安定性を高めている。
具体的には、タイヤの反力をパワーステアリングシステムで検知し、路面μの高低を常に推定する。さらにクルマの対地速度と前輪の回転速度を検知することで、ドライバーにはわからないレベルの微小な前輪スリップ(空転の予兆)を検知し、瞬時に適切な駆動力を後輪に配分し前輪の空転を制御している。
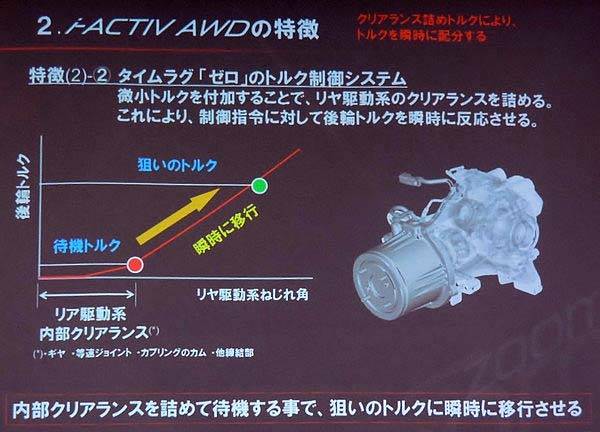
そのためにはタイムラグ「ゼロ」のレスポンスが必要とされるが、それがi-ACTIV AWDの特徴の2番目となる「状況急変に対するスリップ予防制御」である。これは後輪駆動ユニットの反応を高めるため、前輪中心の駆動時にも微小なトルクを後輪に伝達させたまま待機している。いうなれば駆動比が99:1となっているわけだ。
その理由として、駆動系の部品が持つスムーズな動作のために意図的に作られた隙間やねじれによるわずかなタイムラグをなくした状態で待機させる必要があるのだ。プレアクションとでもいうのかスタンバイ状態に常になっていれば瞬時の反応が可能になるというわけだ。また、このスタンバイトルクによる燃費などのロスは、ほぼゼロということだ。
さて、車両の安定性を高める方向のAWDの他に、さらにマツダのi-ACTIV AWDは冒頭に書いた燃費にも配慮がある。AWDは燃費が悪いというのが一般的で、機械的ロスはあるし、適切ではない駆動力がかかっているから損失は多くのポイントで起きているのはわかる。
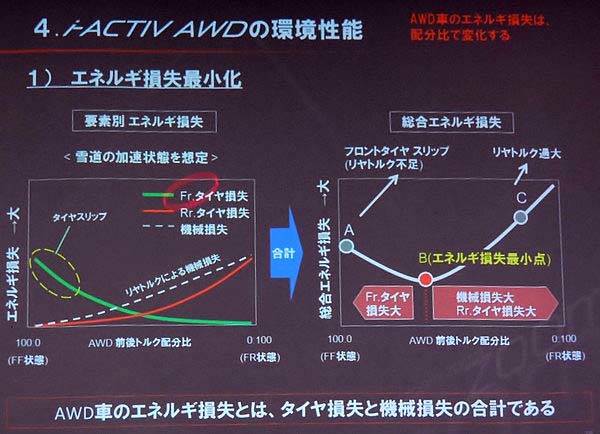
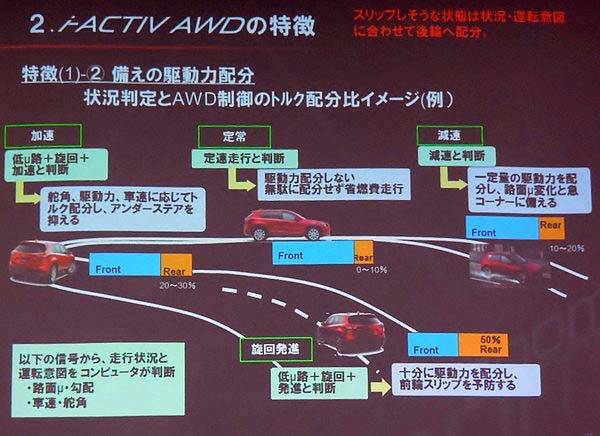
そこで、前後のトルク配分にはエネルギーロスを最小にする最適のポイントがあるという。つまり、FFだけで走行するよりリヤの駆動を加えたほうが、効率が良くなるポイントがあるというのだ。直進時はFFで走行しながらもコーナリング時にリヤへの駆動があったほうが効率的になるというポイントを常に制御で作れれば、2WDの燃費に迫るAWDの燃費になるという理屈だ。開発責任者の八木康氏は「AWDでFFの燃費を超える目標です」と語る。
■インプレッション
さて、これらの理論を踏まえて試乗してみる。テストコースはいずれも雪道で、パイロンを使った特設の旋回コース、ワンディングを模したハンドリング路、登坂路、直線路をテスト。車両は前述のようにマツダ・スカイアクティブオールラインアップだ。
もっともわかりやすいのは登坂路。斜度12%の斜面で停車。坂道発進が滑らず普通に発進できるか?というテストで、アクセルの開け方に気を使うことなく普通に発進できた。ちなみにテスト車すべてブリヂストンのブリザックで統一されていた。次に、条件を厳しくするため、坂道で斜めに停車し、ステアリングをロックまで切った状態からの発進をテスト。これもなんなく発進する。実は他メーカーのモデルでは発進できないというシーンも確認された。

この時の状況でクルマのセンシングは車速ゼロ、舵角400度、アクセル開度ゼロ、勾配、外気温、路面μを検知し、トルク配分制御としては、旋回しながら雪道の上り坂を発進すると判定し、後輪へ十分なトルクを配分した状態で待機している。比率ではフロントの60:40。そして発進し、登りはじめると状況の変化にともないトルク配分も随時変化し、ドライバーは滑りを感じることなくスムーズに登りきる。
次にワインディンのような雪道の上り下り。時速は60㎞/hほどまで出せる。つまり、夏の舗装路と同じレベルで走れるのだ。雪道のため舗装路のようにフラットではないから、車体が揺れることはあるが、滑りを感じることなく夏のワインディングを走るように気楽に走れる。
下りの状況になると先入観も働き慎重になる。アクセルがオフで下り始めたときは車速、ステアリング舵角0度~60度、アクセル開度ゼロ、加速度-0.1G、勾配、外気温、路面μなどを判定し、雪道をエンジンブレーキ状態でコーナーに進入と判断し、後輪へトルク配分される。その際65:35に変化する。


すこし意地悪に、速度を上げ、下りでもアクセルを開けているとタイヤのグリップ限界を超え滑り始める。そうなると車両はグリップが回復するようにトルク配分を行ない、車両を安定させる。さらに高い速度でコーナーに進入すると危険領域となるので、ブレーキが自動で作動しグリップを回復させるという二重三重の制御により安定方向になる。
なぜ、これほどまでに安定的に走れるのか?前後のトルク配分を変えるだけで可能なのか?という疑問もあったが、それは旋回路でのテストで謎は解けた。そこにはテスト車としてアクセラのFFとAWDが用意され、同じパイロンコースを走れた。
フルターンのような場面でもAWDは滑らかに加速し、オンデマンド式の有利さをアピールする。ステアリングがロック状態からでも滑らかに加速するのだ。一般的には詰まったような動きをするものだが…。
そしてFFで同じコースを走ると後輪のグリップがわかりやすく、FFであるにもかかわらずドリフト状態を維持しやすいというコントロール性の高さを感じた。つまり、意のままに操れるし、自然な動きをするので、その動きに対応、あるいはその動きに持っていく、というアクションが可能なのだ。


これはリヤサスペンションがパッシブに制御されているからだろうと想像する。横力が加わった時にトー変化がナチュラルになるように、妙な力が入らないコントロールをしているからではないかと思う。ブッシュコントロールが絶妙なのだろう。最近ではリヤのトーコントロールをアクティブに行なうことでコーナリングスピードを上げられるモデルも出始めているが、ドライバー心理としては、これまでに味わったことのない妙な動きで、居心地の悪さを感じてしまう。アクセラはFFであっても雪道でこれだけコントローラブルに扱えるから、前後のトルク配分が緻密なオンデマンド制御も加われば、だれでも違和感なく安定した走行が楽しめるという結論になるのだろう。
こうしてすべてのテスト路で安定した走り、安心の走りがあり、アグレッシブに雪道ドライブをしても楽しめるというオンデマンドAWDであることが体験できた。
ハード部品による性能アップはもちろんだが、電子デバイスから得られるデータの利用方法によって性能が変化する代表的なアクティブ・オンデマンドAWDと言えるだろう。これからの時代、ハードの進化と並行し、得たデータの使い方による進化の時代に突入していることを実感した試乗テストだった。















