
このところのマツダの勢いが凄い。2009年にスカイアクティブという技術を発表して以来、次々と革新的な、常識を打ち破る新型車がデビューしている。ディーゼル乗用車がこんなに町中で普通に見るようになったのも、スカイアクティブが一つの要因であることは間違いない。そのマツダが、今度は「スカイアクティブ・ヴィークルダイナミクス」という新技術を発表した。具体的には「G-トルクベクタリング」を開発し搭載したものだ。<レポート:高橋 明/Akira Takahashi>
スカイアクティブ・ビークルダイナミクスとはシャシーとパワートレーンという二つの動的性能開発部隊が一つの目標に向かって実現した新技術で、エンジン、トランスミッション、ボディ、シャシー等個々のスカイアクティブを統合制御することで、マツダが提唱する人馬一体の走行性能を高める新世代車両運動制御技術ということになる。
少しややこしいが、開発段階で各専門部隊が横の連携を強め、それが制御領域にまで踏み込んでいることが特徴的で、今回のヴィークルダイナミクス技術は、クルマの運動性能を制御するうえで革新的であり、他社から追従される技術でもあるわけだ。さらに、マツダはこうした各ユニット間の連携による性能進化をますます進めていくとも説明している。

そしてヴィークルダイナミクスは、常識にとらわれず、自由な発想でブレークスルーをしたということと、すべてのユーザーに届けることができるという点で、マツダはスカイアクティブという名称を使い、それはドイラバーだけに限らず、助手席、後席の人にもその恩恵を与えることができるというものだ。車両運動制御技術には、具体的に危険回避としても有効な横滑り防止、車両安定装置のESC、スポーティな、そして車両安定のためのコーナリング制御である前後、左右のトルクベクタリング、あるいはブレーキを個別に差動制御するベクタリング技術があるが、マツダの新技術はこれらのさらに前段での車両の安定、運転疲労改善、乗り心地改善などに役立つポジションに位置付けられる車両運動制御技術だ。従って開発スタッフが「地味だが効果が高い技術」と言う所以でもある。
■G-ベクタリング・コントロールとは
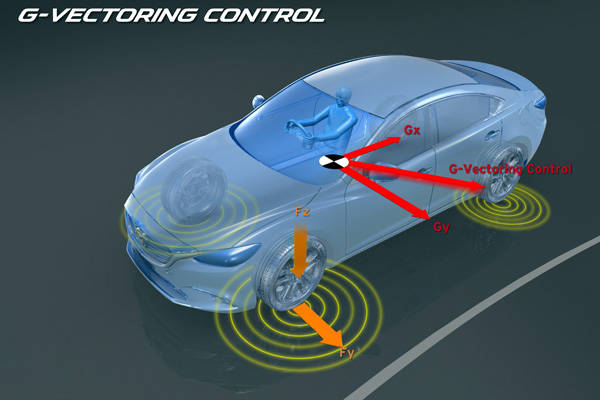
その第一弾が、エンジンを活用したシャシー性能向上技術で、G-ベクタリング・コントロールと名付けられている。
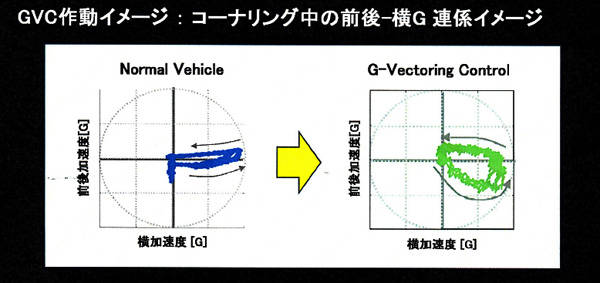
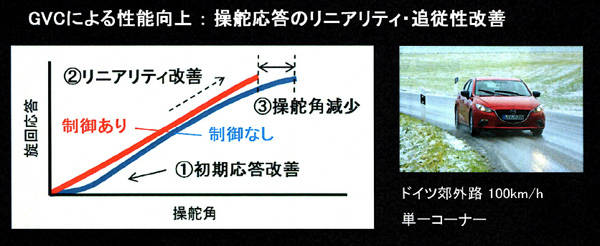
Gベクタリング・コントロールは、ドライバーがステアリングを操作することで制御が開始される。車速や操舵角に合わせて減速Gが自動的に発生し、フロント・タイヤに荷重が2~3kgというレベルでプラスされ、タイヤの接地荷重が増すというもの。したがってタイヤの接地面はよりしっかり路面に押し付けられるため、グリップ力が向上する。そして発生した横Gはより滑らかにより早く旋回が始まる。
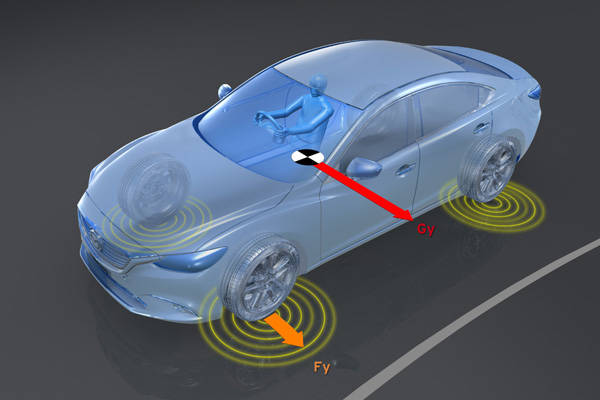
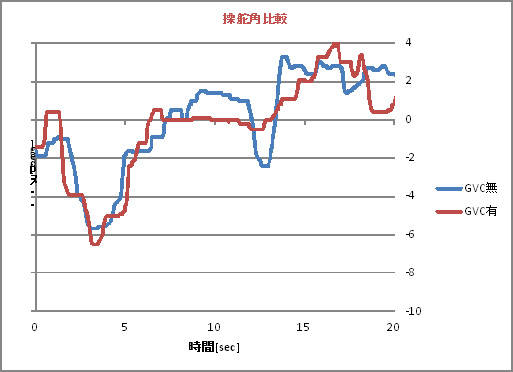
またコーナリングだけでなく、直進走行時でも路面状態に合わせたステアリング修正が一般的には行なわれているため、G-ベクタリング・コントロールは直進状態でも修正舵が少なくなり、安定性、安心感が高まる効果が得られるのだ。さらに雪道や砂利道など滑りやすい低μ路面では一段と大きな効果が得られ、安定したスムーズな走りが実現する。
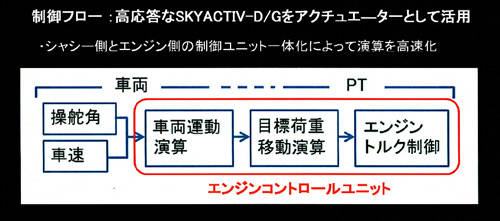
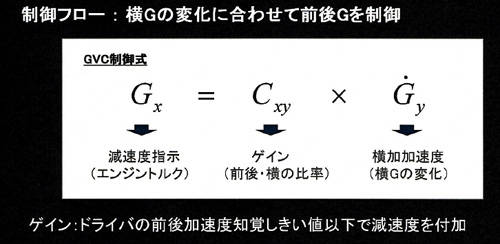
さて、こうした効果はどうやって作られているのか? 制御の流れは次のようになる。システムの入力センサーとなるのは車速とステアリング操舵角、つまり電動パワーステアリングのモーターから得られる舵角情報で、車速に応じた舵角からクルマの運動を把握し、目標となる=予測した前後荷重移動を演算し、必要な減速度=トルクダウン信号をエンジンECUに伝達するというフローだ。
また、トルクのダウンによる減速度は、ドライバーが減速感を体感できるしきい値限度以下の0.05G、時間としては0.02秒以下というレベルで、減速度を発生させるのは0.005秒のサイクルで行なわれる。だからドライバーは減速やパワーダウンといったフィールを全く感じることはない。また、ダンパーが反応するような時間的レベルではないことがわかるだろう。
なお日産・リーフが類似した制御をやっている。じつはマツダもデミオEVでこの技術を開発している。モーターは制御しやすい特徴があるからだ。また、エンジンを使った制御では、BMWのパフォーマンスコントロールがある。このシステムはブレーキによるトルクベクタリングとエンジンのトルクダウン制御を行なうが、アンダーステア、オーバーステアを抑制するシステムと位置付けられ、現象が発生してからの制御であり、予測制御ではない点と、微低速域から作動するという点で、マツダとは異なっている。
■モデルベース開発
技術的な課題としては、こうした極短時間の信号制御をどのように実現するかということがある。現在のクルマはLAN(CAN-BUS)と呼ばれる信号ネットワークが採用され、各種の電子制御ユニットが連結されている。しかし、CAN-BUSの最大通信速度1Mbpsで、極短時間の信号をやり取りするのは難しい。
マツダはスカイアクティブ技術の導入以来、より高速のエンジン制御コンピュータ(ECU)を採用し、エンジン制御も総合トルク制御システムを採用している。そのため、ECU内部に車両運動演算システムと目標トルク演算ユニットを統合し、CAN-BUSを使用せずダイレクトにトルクダウン信号が送られるようになっているのだ。
具体的にトルクダウンは、ガソリン・エンジンでは点火時期を瞬間的に遅角させることで行ない、ディーゼル・エンジンではスロットル・バルブと燃料噴射を制御している。
つまり、スカイアクティブD/Gは高い応答性のエンジンであるため、エンジンをアクチュエータとして利用できたために実現した技術とも言える。では、その高い応答性とは何か? かつてのエンジンはアクセルペダルの開度に応じて出力されていたが、スカイアクティブは要求トルクに応じてトルクを出す総合トルク制御式に代わっている。
それはスロットル開度や踏み込む速度、タイヤの抵抗などで要求トルクを演算し、点火時期、燃料噴射、ターボ車は過給圧などでその必要トルクを作り出しているわけだ。最近のクルマにはスポーツやエコなどのモードがあるが、これらはこうした総合トルク制御式となったために可能となったものだ。
したがって、かつてのROMチューンと言われていたようなチューニングは現在意味を持たない。スロットル開度に応じたマップの書き換えで出力をアップさせていたが、要求トルクは前述の信号から演算されるわけで、その演算値から点火時期や燃料噴射、過給圧などが決まるってくるからだ。
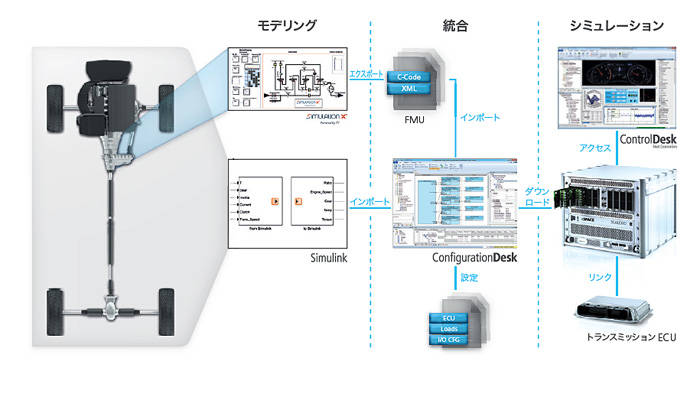
こうしたことができるようになった開発・熟成の背景には、マツダが採用しているモデルベース開発、つまりシミュレーションをベースとしたデジタル開発・設計が活用されていることもポイントだろう。こうした技術・環境を提供しているTia2の「d-space」社は2000年頃、すでにマツダと共同研究を始めており、実を結んできたわけだ。
■G-ベクタリング・コントロールの開発の背景
話はそれるが、「G-ベクタリング・コントロール」と名付けられたこのクルマの運動制御システムは、神奈川工科大学・名誉教授の安部正人博士が名付けている。安部博士は「自動車の運動と制御 ~車両運動力学の理論形成と応用 」の著書で知られるクルマの運動制御研究の第一人者だ。

Gベクタリング・コントロールの研究・開発は、この安部博士と、日立に在籍していた山門誠博士(現・神奈川工科大学 創造工学部 自動車システム開発工学科 教授 )が、クルマの加速度ベクトルをコントロールし、安定した滑らかなコーナリングを実現する車両運動制御システムの研究を行なったのが契機となっている。
この新たな発想の運動制御、つまりハンドリング・コントロールは、山門博士がプロ・ドライバーが運転するクルマに同乗し、その運転を観察し体感したことが大きなヒントになっているという。この経験から山門博士は、ステアリングによるクルマの運動=ベクタリングは、横加加速度(よこかかそくど:時間あたりの横Gの変化率)と前後方向の加速度が密接に関連していることに着目し、制御理論を構築した。
そして実験を繰り返した結果、2009年に日立オートモティブから「安全走行を支援する新しい車両運転制御技術」という論文を発表した。マツダは2010年この研究に加わり、2012年デミオEVで実際にクルマに採用することになった経緯がある。
ちなみに、ベクタリングは推力方向付けと訳し、何らかの入力により進行方向を変化させることを意味する。現在クルマで使用されるトルクベクタリングの表現は左右輪の駆動力、またはブレーキ力の配分差によるヨーイング発生を意味している。
■G-ベクタリングの効果
これで、スカイアクティブ・ヴィークルダイナミクスのG-ベクタリングの内容が理解できたと思う。では、実際に運転者、助手席、後席に座った状態で、この技術効果はどのように感じられるのだろうか?
まず、基本的なところでG-ベクタリング・コントロールはエンジントルクのダウンによる減速度によりコーナリングを制御しているため、アクセルを踏んでいる時に効果的に作動し、当然ながらアクセル・オフやブレーキを踏んでいる状態では作動しないことを理解する必要がある。


栃木県にあるGKNドライブライン・テストコースでの試乗では、まず20km/h程度での走行を試す。そして40km/h程度での未舗装路でも走行してみた。
ハンドルを切りはじめると微小に出力トルクを減らすことで前輪への荷重が増えるわけだから、このときステアリングには接地感のあるフィードバックが伝わってくる。だから運転者は安心感を抱き、あたかもタイヤを持ってカーブを曲がっているかのようなフィーリングを得る。

そしてハンドル保持状態になったらエンジントルクは復元され、安定したコーナリングが持続される。もちろん、ハンドルには手応えがずっと感じられている。そしてカーブの出口では後輪への荷重を促し安定性を向上させ、安定しているという安心感を持ちながらクリアする。
特に未舗装路ではコーナー入口での安心感が高く、イメージよりも速い速度で進入しても大丈夫だろうという予測が湧きあがる。そしてコーナー出口に向かうにつれ、リヤ操舵されているような、高い旋回性を感じ驚いた。こうした効果は直進状態でも感じられ、微小な修正舵が不要となり運転者の疲労を軽減する。

80km/h程度の車速での周回路テストでは、制御のある、なしの違いはダウンフォースを受けたかのような違いを感じる。テスト車両は走行中に制御のオン・オフが行なえる実験車両で、その違いは誰でもが体感できると思う。また、後席においても横方向というより斜め下方向への力を感じ、重心が下がった印象を受ける。もちろん、コーナーで身体が左右に振られる動きも小さくなり、同乗者の疲労軽減にダイレクトに効果がでていることを感じた。
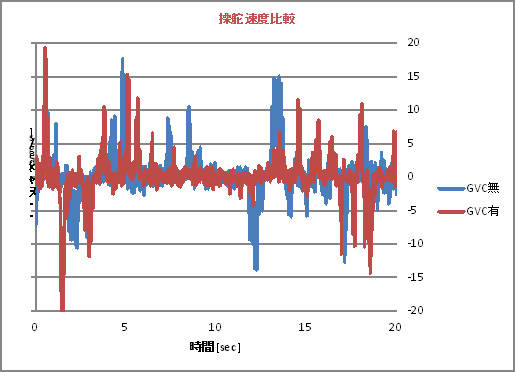
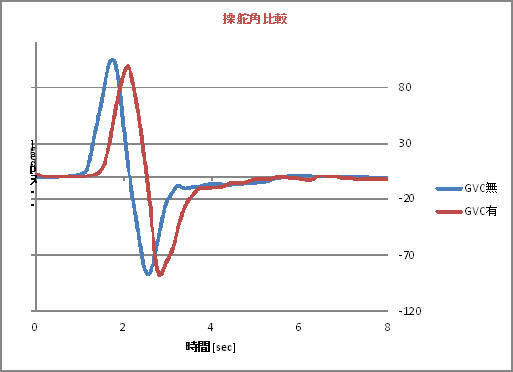
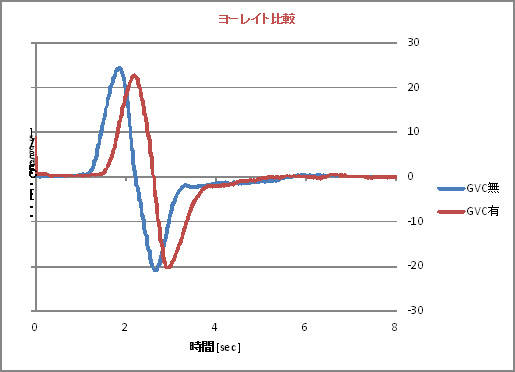
また50km/hでのダブルレーンチェンジのテストでは、驚いたことに進入速度が指定速度を下回ったのではないか?という錯覚にとらわれるほど安定した動きを見せた。最初制御ナシ状態で指定の50km/hで侵入しレーンチェンジをする。そのフィールを身体に残し、そのまま制御をオンにして同様の操作をする。ステアリングの切る量や車両の安定度は明らかに異なり、マツダでは通過速度が5km/h向上という大幅な効果が確認されたという。
これは大幅にタイヤのグリップ力の高いものに交換した場合に相当し、G-ベクタリングはタイヤの性能をフルに引き出す技術という側面もあることがわかる。

このスカイアクティブ・ヴィークルダイナミクスはまもなく市販車両に搭載される。気づけば長距離での疲労が減った、運転が楽になった、乗り心地が良くなった、などの印象を持ち、地味だが効果が高い技術だとわかるだろう。













