この記事は2018年4月に配信した有料メールマガジンを無料公開したものです。
メルマガ登録はこちらから
前回、Uber社の公道での自動運転実証実験車が歩行者をはねる事故について、事件の詳細を掲載したが、再び、テスラのモデルXが高速道路でオートパイロット(アダプティブクルーズコントロール)を作動させた状態で、自損事故が発生した。ドライバーは即死し、周囲のクルマ3台を巻き込む大事故が発生している。

事故の詳細
3月19日にアリゾナ州で発生したUberのレベル4の自動運転車の事故は、自動運転技術の未成熟さや、公道での実験のリスクに関して大きな影響を与える事件だったが、それから4日後、今度はカリフォルニア州サンタクララ郡マウンテンビュー(通称シリコンバレーで有名な地区)の国道101号線で、テスラ モデルXが道路分岐点の中央分離帯の端にほぼ正面から激突する事故が発生した。

ドライバーは即死し、周囲のクルマ3台も巻き込まれた大事故になった。衝突時の車速は80km/h~100km/hであったと見られ、ノーブレーキでコンクリートバリアの角に衝突したため、モデルXのフロント部分(通常の車ではエンジンルームだがモデルXはEVのためトランクスペース)は完全に脱落し、多数の部品が道路上に散乱した。恐らく巻き込まれたクルマはこうした飛散する散乱物を避けようとしての2次事故であろう。
モデルXのフロント部は飛散し、衝突の衝撃は当然ながらフロア部にまで及んでいる。テスラ車はフロア部前面にはEV特有の構造のため、リチウムイオン・バッテリーが敷き詰められており、衝突の衝撃で破損し、バッテリーが発火した。
事故直後は黒煙が上がるほど炎上したが、その後も18650型バッテリーが次々に発火し、小さな炎が上がり続けた。これまでもEVのバッテリーが発火する事件はあったが、交通事故によるクラッシュの衝撃での発火事故としては初のケースといえるかもしれない。
今回の事故は、レスキュー隊にとっても大量のリチウムイオン・バッテリー発火と、その鎮火に手間取るという新たな教訓となった。

この大事故については、国家道路交通安全局(NHTSA)、国家運輸安全委員会(NTSB)も、Uberの事故と同様に、調査に着手しNTSBは即座に調査員2名を現地に派遣している。
なお、事故で死亡したドライバーはアップル社の従業員で、プログラマーのウォルター・フアン(Walter Huang)氏と確認された。フアン氏の家族は、事故を起こしたモデルXは以前からオートパイロットを使用中に、同じ地点の道路分岐点で車線を外れ、中央分離壁へ向かって走り出すことが数度にわたって発生していたと証言している。そのためフアン氏はディーラーに苦情を申し出たが、ディーラーの確認作業ではこの問題が再現できなかったため、特別の対応は行なわれなかったという。
事故発生の時点では、事故を起こしたモデルXをドライバーがどのように操縦していたかが不明だが、消防隊、レスキュー隊に加え、テスラのエンジニアも現場に駆けつけECUが回収されている。
周知のように現在のECUには「イベントデータ・レコーダー」が内蔵されている。飛行機のブラックボックスに相当するイベントデータ・レコーダーは、エアバッグやベルトシステムが起動するのに合わせ、事故発生前からの車速、ステアリング切り角、アクセル開度、ブレーキの作動状態、ベルトの作動、エアバッグの作動、車両の受けたG、そして運転支援システムの作動状況など車両に関する情報が自動記録されている。
なお、欧州、北米ではこのイベントデータ・レコーダーの搭載は義務付けられているが、国内では搭載されていない。
そしてECU解析の結果、テスラ社は、事故車がオートパイロットを作動中で、少なくとも事故発生の6秒前からドライバーはステアリングを握っていなかったと発表した。テスラ社によれば、事故は3月23日午前9時27分に発生。ドライバーはその前にオートパイロットをオンにして、前走車に追従するクルーズコントロール機能を最短距離に設定して使用していた。事故直前には数度にわたってハンドルを握るように警告をディスプレイ表示し、音声でも警告した履歴があるものの、衝突の瞬間に至る6秒間(少なくとも事故地点の150m以上手前)はハンドルを握った痕跡がなかったという。
そのためテスラ社は、事故原因を調査中としながらも、フアン氏の家族の問い合わせに対して、オートパイロット機能は車線を誤認することがあるということが多くのドライバーによって報告されている、事故についてはドライバーに事故直前、数度にわたってハンドルに手を置くよう警告をディスプレイ表示および音声で出した履歴があるものの、すくなくとも衝突の瞬間に至る6秒間はハンドルを握った痕跡がなかった、道路状況に注意を払っていなかったと公表した。
しかし、フアン氏の親族は、前述のように、すでにオートパイロットの不具合についてフアン氏は認識しており、テスラ社のいうように手放し運転をしていたとは信じられないと語っている。
事故の状況とテスラのオートパイロット2.0
モデルXが事故を起こした地点は、高速道路の分岐点にあるコンクリート障壁の前に置かれるバリアのへの衝突だった。つまり固定されたバリアへの正面衝突である。そのバリアは、本来は頑丈なコンクリート製の隔壁式の中央分離帯の手前5~7mほどは金属製の衝撃吸収バリアである。だが、以前の事故で潰れたまま新品に更新されず、バリア部は1mに満たないほどに短縮されたまま放置されていたことが事故をより深刻にした。また車線の分岐点からバリアに衝突するまでには、車線をはずれて150mの距離がある。

したがって、もしドライバーがステアリングを握っていれば、例え意図せず車線を逸脱したとしても、進路を修正する時間的、距離的な余裕は十分あったといえる。
当日は晴天の朝で、カリフォルニア特有の強い日差しであった。この強い斜めからの日差しと、高速道路の分岐点で使用される分岐を意味するV字の白線が、テスラのオートパイロット2.0では認識できない、あるいは誤認識する可能性が考えられる。

スバルのアイサイトはアメリカ市場にすでに投入されているが、日本仕様とは異なり操舵アシストは採用されていない。その理由は、アメリカでは車線の表示が多様で、また車線が薄れたりなどというメンテナンスが悪いケースも多いので、車線逸脱警告にとどめているという。このことからもわかるように想像以上に正確な車線の検知、判定、認識は難しいといえる。
現在のテスラが搭載するオートパイロット2.0は、2016年5月に発生したモデルSによる死亡事故の結果、大幅に改良されている。もともとテスラのオートパイロットは「モービルアイ」のカメラによる画像認識技術をメインにしていたが、事故発生の結果、新たなシステムを構築している。
前方用のミリ波レーダーの性能は、従来よりアップグレードされ、雨や霧での性能が向上し、前走車の前を走行するクルマを前走車のフロア下を通過する反射波も検知することもできる。つまり1台前のクルマの加減速も検知できる。さらにクルマの全周に配置された12個の超音波センサーも、これまでの2倍の距離の物体を、8mの範囲まで検知ができるようになっている。
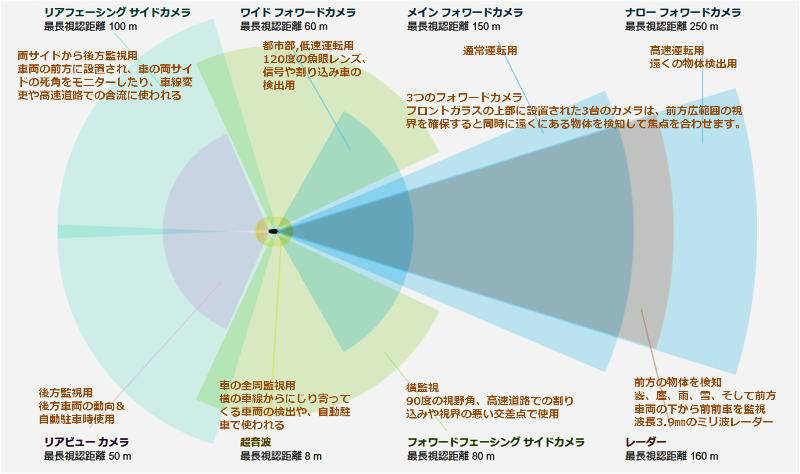
フロントカメラは中距離ステレオカメラ、長距離カメラの2種類、3個を採用し、前方の最長望遠距離は250mに達する。これ以外にクルマの左右や後方用に5個のカメラを搭載する。ミリ波レーダー、複数のカメラ、超音波センサーなどのセンサー情報はニューラルネットワークを形成し、クルマの制御を決定するコンピュータは、最新世代のNVIDIA製のGTUタイタン・スーパーコンピューターが搭載されている。このスーパーコンピューターは従来のコンピュータの40倍の演算能力を持っており、完全な自動運転モードもカバーできる能力を持つとされている。
またニューラルネットワークとは、センサーから得られた大量の情報をベースに、合理的なパターンを見つけ出し、クルマの回りの状況判断や状況予測に利用するアルゴリズムで、具体的には、カメラ、レーダー、超音波センサーなどの情報をベースにした物体画像認識と交通環境の認識、そしてそれらの蓄積データからのデータマイニング(適切な行動データの抽出)を行なうという仕組みになっている。
このニューラルネットワークの手法とNVIDIAのスーパーコンピューターにより、人間では不可能な全方向の情報を常時取得し、人間一人では把握不可能な次元でクルマの周囲や交通環境を捉えることができ、こうした機能により、将来の自動運転にも適合できる能力が与えられているとされている。
しかし、このオートパイロット2.0であっても、今回の事故のように、分岐点で使用されるV字の白線、強い午前の日差しなどで正確な判断ができなくなったと想定され、自動運転をイメージさせる「オートパイロット」という名称が付けられたアダプティブクルーズコントロールはレベル2(運転支援システム)であることが改めて認識させられる。
もちろん、テスラ社も、完全なオートパイロット(自動運転)ではないこと、ドライバーはオートパイロット2.0を作動中でも周囲に常に注意し、ステアリングをドライバーは手にしておく必要があることは、特に2016年5月以降はユーザーにアナウンスしている。
しかし、現実にはアメリカのユーザーは、道路環境がよいこともあってシステム任せでテスラに乗っているケースが少なくない模様だ。
このような現実を直視すると、よりハイレベルの技術のレベル3(高度運転支援システム:ADAS)も、むしろ不安要素が拡大したといえる。レベル3のADASでは、高速道路、自動車専用道路での加速、減速、車線変更など操舵の自動化、つまり自動運転が実現し、ドライバーは道路・交通環境を注視し、もし自動運転システムが正常に作動できない時は警報が鳴り、ディスプレイに警告表示が点灯する。その場合はドライバーはとっさに手動運転に切り替える、ということになっている。
しかし、レベル2のアダプティブクルーズでさえ、ドライバーはシステムに頼るため、レベル3ともなれば、むしろシステムに依存する傾向はより強まり、システムで運転不可能な状況ではドライバーが運転を引き継ぐということは到底現実的とはいえないのだ。

そのため、GMのレベル2の運転支援システム「スーパークルーズ」は運転席をモニターするカメラを使うことで、ドライバーが進行方向から目をそらすと警告するシステムを装備しているなど、ドライバーモニタリングは必須となる。レベル3の場合ではドライバーモニタリングにより、ドライバーが居眠りや脇見、他の作業をしていると検知されると、自動運転システムはキャンセルされ、クルマは路肩に停止するといったシステムが必要なのだ。
もちろん今回のテスラ モデルXの事故については、正式な国家道路交通安全局(NHTSA)、国家運輸安全委員会(NTSB)の事故報告書を待つ必要があるが、レベル2のアダプティブクルーズコントロール、レベル3の部分自動運転に関して何らかの方向性が決定されるはずである。