今回からレポートする内容はZFのビジョン・ゼロに向けた「see ,think, act」というキャッチワードに対する、具体的な技術を体験したものだ。「see」は言うまでもなくセンサー技術でカメラや、レーダー、ライダーなどで捉えた事象を「think」=アルゴリズムによって解析し、どんなアクションをしなければならないかを考え、「act」シャシー技術で危険回避、自動運転へとつなぐZFのビジョンだ。<レポート:高橋 明/Akira Takahashi>
ZFグローバル試乗会レポート vol.1 自動運転、EV化への未来像
ZFグローバル試乗会レポート vol.3 ZFが開発を進める自動運転はレベル2、3の強化とレベル4までの道程
ZFグローバル試乗会レポート vol.4 データで動かすシャシーコントロールの世界

最先端技術がてんこ盛りの車両ということで、センサー系ではドライバーの監視や、車線、標識の認知、そしてそれらの情報を処理して、シャシーに伝える。そのシャシーにもリヤ操舵機能とそのモジュールが装備され、ZFのビジョン・ゼロへとつなぐソリューション群ということなのだ。
■革新的モデル「Vision ZERO vehicle」
ビジョン・ゼロヴィークルはZFが提案する革新的な車両で、「ドライバー・ディストラクション・アシスト」(ドライバーの不注意運転による事故を防ぐこと)や、「ロングウエイ・インヒビット」(車線逆走やそれによって引き起こされる死亡事故を防ぐためのソリューション)を搭載している。

ドイラバー・ディストラクション・アシストはドライバーの目を監視し、不注意を認識し、ステアリング操作を自動で行なう。学習能力を持たせたレーザーTOF(time of Flight=光測距)カメラが搭載され、ドライバーのよそ見など頭部の位置を3次元画像で監視。ビデオカメラとは異なり暗い状態でも有効なものだ。
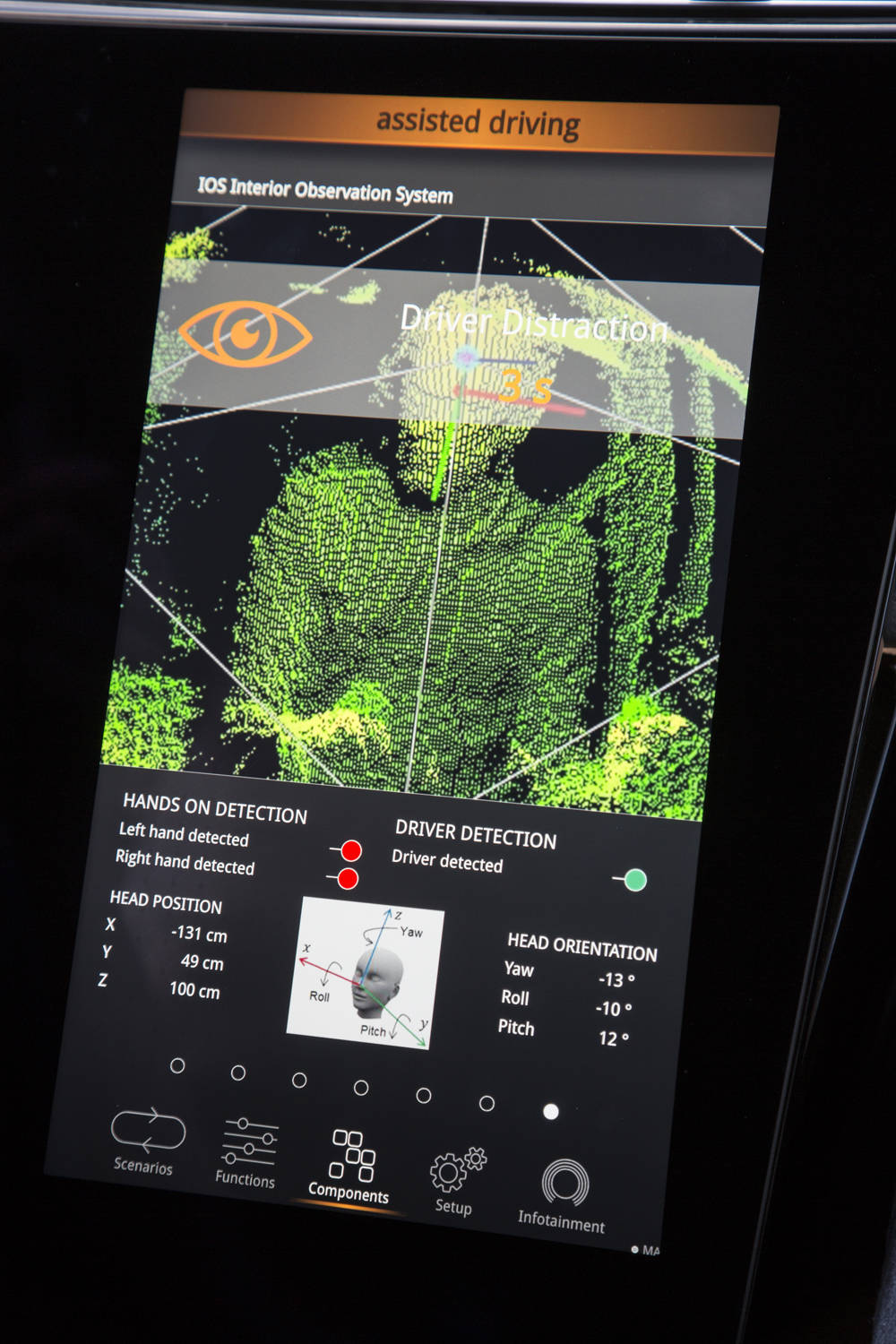
例えば、ドライバーが道路から視線を外すとすぐにシステムに伝えられ、危険な状態の場合、中央ディスプレイに表示、音声信号、シートベルトの引き締めを行ない、ドライバーに警告する。同時にスタアリング操舵も自動で行なわれ、カーブでも車線は維持される。それでもドライバーが反応しない場合には、システムはスロットルを閉じ、安全な場所に車両を停止させる。

もうひとつの機能はロングウエイ・インヒビット(wrong way inhibit=逆走防止)。重大事故につながる車線の逆走を防止する機能で、高速道路への逆走進入はなにも日本だけに限った事故ではない。アメリカやドイツでも起きているという。
このシステムは視界不良や方向感覚の喪失、不注意などからドライバーが高速の出口から進入しそうな場合、即座に反応する。システムはまず、音声、シートベルトの振動、ダッシュボードのディスプレイ表示によって警告を発し、さらにステアリングの抵抗を大幅に強めて、ドライバーに方向が間違っていることを伝える。それでもドライバーが修正せず、逆走しようとすると、車両制御により車線の端へ誘導走行し、歩行速度まで減速した後で停止する。さらに、ヘッドライトとハザードランプを点滅させ、対向車に知らせる措置を行なう。ドライバーが操作できるのは、リバースに入れ危険な場所からの脱出する操作のみに限定される。
これらの認識はいくつかのセンサーによって正しい走行路と走行方向を認識し、クラウド経由で常時更新される高精度マップ、そして前方カメラシステムで道路標識、路面標示が認識、解析されている。
■試乗テストドライブ
さてテスト車をドライブし、進入禁止の道路標識を無視し、進入しようとすると、音声やディスプレイ表示、シートベルトの振動で知らせてくるが、これも一瞬のことだ。車両はすぐに路肩へ誘導され停止する。高速道路への逆走進入は、ドライバーは逆走している認識がなく、正しいと勘違いしているケースが多い。そのため、一瞬にして制御される必要があるからだろう。
テストはそのまま40km/h程度でテストコースを走行する。すると、大きな段差が視界に入る。およそ15cmくらいか(目視で)。そのままの速度で通過しようとすると、車両は自動で減速し、クルマにダメージのないレベルの進入速度で通過する。

次に意図的に前方不注意の状況を作る。目線と頭はセンターに設置されたモニターを見つめる。すると、シートベルトが振動し、モニターにも警告が表示されドライバーに知らせる。
こうしたシステムでは音声がどうしても人工的で、人間が聞こうとしないと聞こえてこない場合がある。さかんに警告されても認識しにくいのかもしれない。それはドイラバーは自分の運転が間違っているとは認識していないから、警告が耳に入らないということかもしれない。そのため、シートベルトの振動が行なわれるのは新鮮だ。これは、明らかに日常と異なるアクションのため、ドライバーは認識しやすいと思う。
ちなみに、自動運転のレベル3以降でシステムがドライブしていて、何らかの状況でシステムドライブが不可能な状況になったとき、ドライバーへ運転が戻される。その際、ZFのシステムではこのシートベルトの振動を採用しているという。つまり、この先システムドライブが不可能になると判断したら、シートベルが振動し、人間がドイラブするように促すためのツールとしているということだ。もちろん、モニター表示や音声での警告があるのは言うまでもないが。
そして、このテスト車は100%EV車両で、ゼロエミッションということもあるが、こうした制御システムを稼働させるには、さまざまな分野でモーター駆動が有効であることが背景にある。ステアリング操舵やブレーキ制御、出力制御などを稼働させるためにはμsec(マイクロ秒)で制御し、そして反応させるには電動モーターが必須のアイテムというわけだ。
■統合型リヤ・アクスル電動ドライブ mSTARS
このテスト車にはactの部分として、mSTARSが搭載されていた。これは、モジュラー式の統合型電動ドライブで、ドライブラインとシャシー技術を単一システムに統合した革新的乗用車用アクスルだ。ちなみにmSTARSはセミ・トレーリングアーム・リヤサスペンションの略。

特徴は既存のプラットフォームでも、簡単に電動化が可能で、従来のハイブリッド、燃料電池、EV駆動はもちろん、AWD車にも対応でき、シャシーのマイナーチェンジでの車載が可能としているのが特徴だ。

さらに、このテスト車はリヤに駆動モーターのアッセンブリーを搭載していて、アクチュエーターを介し、リヤのタイロッドに相当するリンクを動かし、リヤ操舵できるAKC(アクティブ・キネマティック・コントロール)を搭載している。ちなみに、ブレーキはブレーキバイワイヤだ。

デモンストレーションでは、このmSTARSとAKCを搭載するビジョン・ゼロの車両で自動運転を設定。自動走行中、地面に置かれた障害物を自動で認知し、ステアリング操作を自動で行ない、障害物をよける。この時、リヤがステアする動きを体験した。動きとしては「スライド」したイメージだ。

このフィーリングは上部の動画をもう一度、見てほしい。画像からもスライドしていくのが分かると思う。斜め移動とでも言うのか?ドリフトなのか?これまでに感じたことのない滑らかでスムーズな斜め移動をした。スキッドステアなのか、車内でのフィーリングは新しい体験であったことは間違いない。
次回はさまざまなソリューションの紹介とインプレッションをお伝えしよう。
ZFグローバル試乗会レポート vol.1 自動運転、EV化への未来像
ZFグローバル試乗会レポート vol.3 ZFが開発を進める自動運転はレベル2、3の強化とレベル4までの道程
ZFグローバル試乗会レポート vol.4 データで動かすシャシーコントロールの世界













