
2014年5月21日~23日、パシフィコ横浜で自動車技術会が主催する恒例の「人とクルマのテクノロジー展」が開催された。展示ブースへの出展は491社と過去最大の規模。学術講演会における論文発表は446編となった。また入場者は登録者のみで8万7000名を超え、日本最大の自動車テクノロジーが一堂に会するビッグイベントになった。

主催者特別企画として「人と社会に優しい先進クルマ技術 ~2020年のモビリティ<カーロボティクスを体験しよう~>」が開催されている。現在の先端自動車技術と位置付けられるクルマの知能化、自動運転化をテーマにした企画だ。
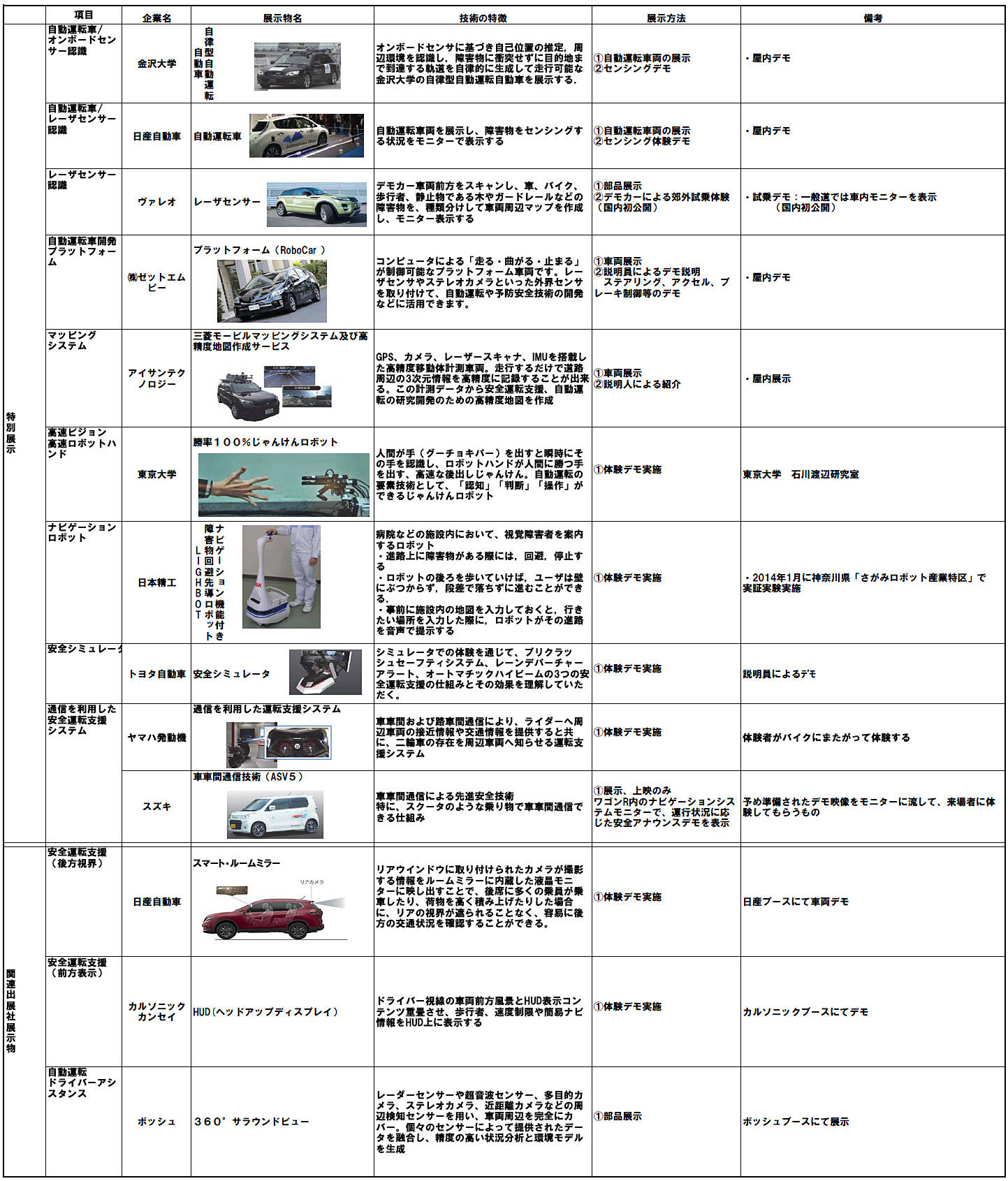
展示・デモンストレーションされた内容は以下の通り。
・自動運転(自律型自動運転):金沢大学
・自動運転(自律型自動運転):日産
・レーザーセンサー認識:ヴァレオ(レーザースキャナーによる交通環境認識)
・自動運転車開発プラットフォーム:ZMP(コンピューターによる車両運動制御)
・マッピングシステム:アイサンテクノロジー(各種センサーにより3次元マップを作成)
・高速ビジョン/高速ロボットハンド:東京大学(絶対に勝つじゃんけんロボット)
・ナビゲーションロボット:日本精工(障害者をガイドできるロボット)
・安全シミュレーター:トヨタ(運転支援システムを実感できるシミュレーター)
・通信を利用した運転支援システム:ヤマハ(車車間、路車間通信を使用した2輪車)
・通信を利用した運転支援システム:スズキ(車車間通信による安全運転支援)
・安全運転支援:日産(後方カメラを使用しルームミラーに映像を表示)
・安全運転支援:カルソニックカンセイ(ヘッドアップディスプレイ)
・安全運転支援:ボッシュ(多種類のセンサーを使用した360度ビュー)
この中で、日本で初となるヴァレオ社の2次元レーザースキャナー搭載車に体験試乗した。
すでによく知られているように、自律型自動運転を行なうためには自車の周囲の車両や歩行者はもちろん、地形、道路などもすべて把握する必要がある。
そのため、Googleカーを始め、その他の自律型自動運転車の多くは、クルマのルーフ上に大出力の3次元レーザースキャナーを搭載している。このレーザーにより360度の障害物の距離や移動速度、さらに地形まで検知している。この3次元レーザースキャナーはIBEO、ヴェロダインなどが知られているが、かなり高価である。また日産の自動運転実証実験車はIBEO社の2次元レーザースキャナーを複数個装備し、車体全周の障害物を検知している。


IBEO社と業務提携しているヴァレオ社が今回出展したのは前方左右150度を2次元レーザースキャンするタイプで、量産実用化可能な価格帯だという。このタイプのレーザースキャナーは、レーダーやカメラを使用した衝突回避・被害軽減ブレーキのセンサー、あるいは無人自動パーキングなどに使用することが想定されている。
大出力の強力なレーザースキャナーは人間の目に有害だが、今回のタイプは人体にも安全なもので、前方左右方向のレーザースキャンはミラーを回転させることでスキャンを行なう。テストカーはレンジローバー・イヴォークで、画像のようにフロントのロアグリルの中央にスキャナーを設置していた。

今回のテストカーは、スキャンしたデータはパソコンのディスプレイに表示されるようになっており、ほぼ生データで表示されていた。路上に出ると、ディスプレイには建物、ガードレール、歩行者、そしてクルマが表示される。レーザースキャナーのメリットは、建造物、植物や歩行者など、レーダーが苦手とする対象物もきちんと把握できること。その点ではカメラによる画像認識と似ている。また、雪や雨など気象条件にも適合能力が高いという。
またこのレーザースキャナーは、左右150度、認識距離は200m以上で距離はロングレンジレーダーに、角度は近距離レーダーに匹敵する優れた能力を備えていることがメリットとなっている。これらの点から、レーザースキャナーは次世代のドライバー支援システムには最適のセンサーと位置づけることができる。













