トヨタ・リサーチ・インスティテュート・アドバンスト・デベロップメント(TRI-AD)と、オランダ・アムステルダムにある位置情報テクノロジーの専門企業であるトムトム社は、2020年3月11日、NTTデータ、デンソーを始めとするパートナーと協業し、より安全な自動運転の実現に不可欠となる高速で高精度(HD)な地図生成手法の開発に向けた実証実験が成功したと発表した。
概要
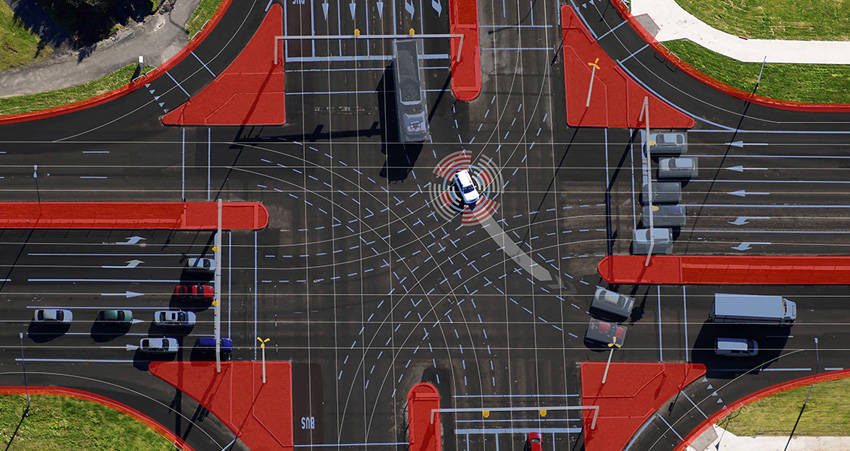
この実証実験は、従来の複数のLiDARなどを搭載し、専用の地図データ収集車を多数使用する方法はコストがかかるため、広範囲での網羅が難しい。今回の実証実験では、自動車専用道路に限った高精度地図生成に対する効果的な手法を検証することを目的としていた。そして、複数のパートナーがコラボレーションして実証実験を実施し、自動運転に必要な相対精度50cm程度以下の地図生成が可能であることが確認されたのだ。
この実証実験では、専用の計測車両を使用せず、衛星や一般車両から得られる画像データなどを元にして、自動運転用の地図情報が生成でき、TRI-ADの自動地図生成プラットフォームであるAutomated Mapping Platform上のデータ形式へ変換し、アルゴリズムを補正することにより、トムトム社のプラットフォームで活用できることなどが確認された。

まず、宇宙技術ソリューションをリードするマクサー・テクノロジーズ社、日本のITサービスを牽引するNTTデータとTRI-ADは、2019年4月25日から3社合同で高解像の衛星画像を用いた自動運転用高精度地図の自動生成に向けた実証実験を実施。
その中で、衛星画像に写る自動車や影、建物の倒れこみによる遮閉などの地図以外の要素を自動で解析し、除去、補正することで必要な地図情報を自動抽出することに成功した。東京23区と海外6都市で、自動運転制御に活用できる相対精度25cm程度の地図生成を実現し、自動運転用地図として有用であることを確認した。
道路インテリジェンスのプラットフォームを提供するCARMERA Inc.とTRI-ADは、東京23区と米国2都市で、一般車両にも搭載可能なドライブレコーダーを使用した自動地図生成技術の検証を実施。この中で、ドライブレコーダーのデータのみで自動運転に必要な相対精度40cm程度の地図生成に成功。
両社が連携し、CARMERAのReal-Time Events and Change Management engineと同じマシンラーニング技術などを使用することで、自動運転に必要な最新情報を判別し、HDマッピング・システムに送信、更新することが数分でできるようになっている。これにより、AI認識に必要な画像データを収集し、幅広いエリアの地図生成の可能性について実証できたのだ。
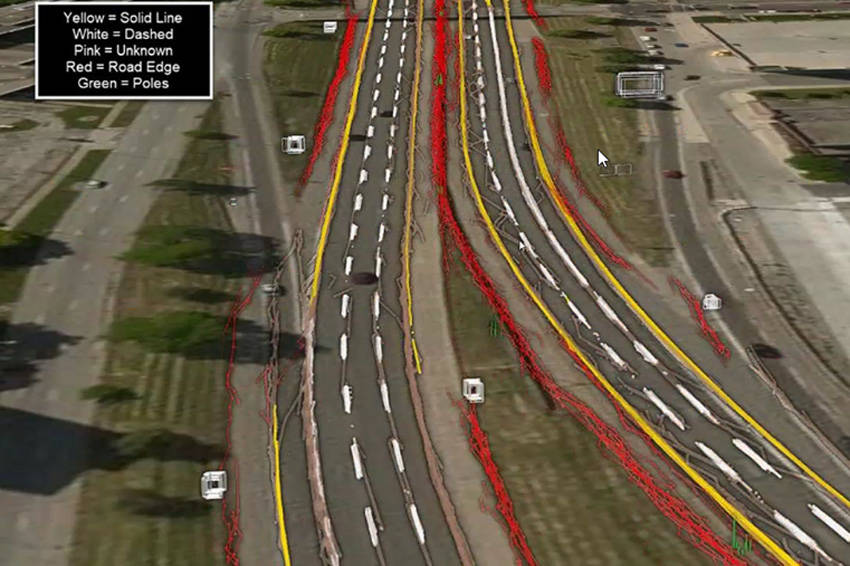
TRI-ADは、位置特定技術をリードするトムトムと新たな実証実験を行なった。デンソーの車両センサーを搭載したTRI-ADの試験車と、TRI-ADの自動地図生成プラットフォームであるAutomated Mapping Platform(AMP)、そしてトムトムのクラウドベースのトランザクション・マップ・プラットフォームの活用により実現した。
車両センサーは道路上で観測された情報を収集し、それらの情報はTRI-ADのAMPによりデータ形式変換および補正がされ、トムトムのトランザクション・マップ・プラットフォームに反映されるというシステムだ。
これらのクラウドソース・マップの更新は、トムトムのHDマップが実際の道路の状態を正確に反映するために活用される地図アップデート情報であるローダグラム(Roadagrams)によって実現する。これにより、調査車両からのセンサーデータと組み合わせることで、トムトムが高精度地図の精度を維持できるようになるのだ。
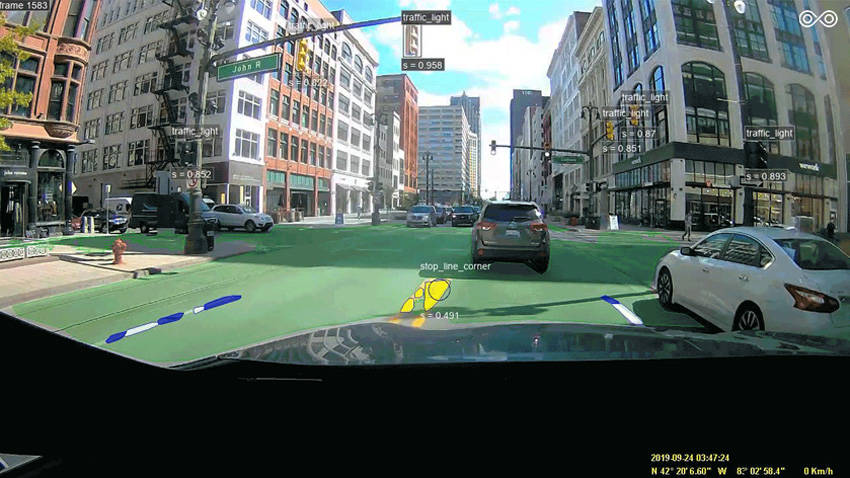
さらにTRI-ADは、世界をリードする位置情報データおよび位置情報技術のプラットフォームを提供するHEREとの共同実証実験も行ない、TRI-ADの車両データの位置誤差をHEREの高度セルフヒーリング技術で補正することにより、自動運転に必要な車線情報を含む一般道高精度地図の生成に成功。車両データをHEREプラットフォームに入力することで、HERE独自のアルゴリズムで高精度の一般道地図を自動生成することも実現している。
トムトムの自動運転部門責任者ウィレム・ストライボッシュは、「トムトムでは、様々なソースを元に高精度地図を作ることで、より安全な自動運転を可能にします。デンソーとTRI-ADとともに、HDマップの更新を可能にし、高速かつ高精度な地図生成方法を提供できることを喜ばしく思います」とコメント。
TRI-ADのマップ部門のマンダリ・カレシー副社長は、「Maxar、NTTデータとCARMERAとのこれまでの実証実験の成果および、新たな実証実験パートナーであるトムトム、HEREとの成果を発表できることを、大変嬉しく思います。人々にとって自動運転がより安全で身近な技術となる未来にまた一歩近づきました。さらに精度を向上させるため、今後もパートナー企業との連携を進めて参ります」と語った。
デンソーの藤守規雄エグゼクティブフェローは、「TRI-ADおよびトムトムと今後も多くのコラボレーションに取り組み、成功することを期待します。デンソーのハードウェアとソフトウェアの両方を組み合わせることで、未来のモビリティの変革を実現します」と述べている。
Twitter:https://twitter.com/autoprovenet
facebook:https://www.facebook.com/autoprovepage/
Youtube:https://www.youtube.com/user/autoprove/
TRI-AD 公式サイト
デンソー 公式サイト
NTTデータ 公式サイト
CARMERA 公式サイト
マクサー・テクノロジーズ 公式サイト
HERE 公式サイト
トムトム 関連記事
トムトム ジャパン 公式サイト














