automobile study
ジェイテクト(JTEKT)という企業名は、一般的には知名度が高いとはいえないが、電動パワーステアリングやオンデマンド4WDカップリングでは世界一のシェアを持つなど、現在のクルマを支える重要な部品を開発、生産しているサプライヤーだ。そのジェイテクトが最新技術を搭載したクルマの試乗会を、同社の伊賀試験場(三重県・伊賀市)で開催した。

舞台は三重県・伊賀市郊外にあるジェイテクトの「伊賀試験場」だ。ここは、2012年にオープンした総敷地面積50万m2で、総合周回路、ワインディング路、ダイナミクスパッド、低ミュー路などからなる総合プルービンググラウンドとなっている。
今回この試験会場でさまざまな製品の説明とテストを体験してきたので、早速アイテムごとにお伝えしていこう。
「ハプティック・シェアード・コントロール」テスト
ラックパラレル式電動パワーステアリングのトヨタ・カムリをテスト車両とし、自動運転モードの走行状態から、ドライバーの運転へ切り替える「シェアードコントロール・モード」のテストで、システムによる操舵意図がドライバーへ伝達されていることを体験した。

まずは自動運転モードで走行する。ステアリングもペダルも自動操縦され、次に「シェアード・コントロール」の状態を体験する。ハンドルに軽く手を添えているとステアリングが自動で操舵される時のトルクを感じる。その感じ方は想像していたより穏やかで自然であったが、自動運転システムが操舵しているという意図を感じさせるには、もう少し強めのインフォメーションでもよいと感じる。

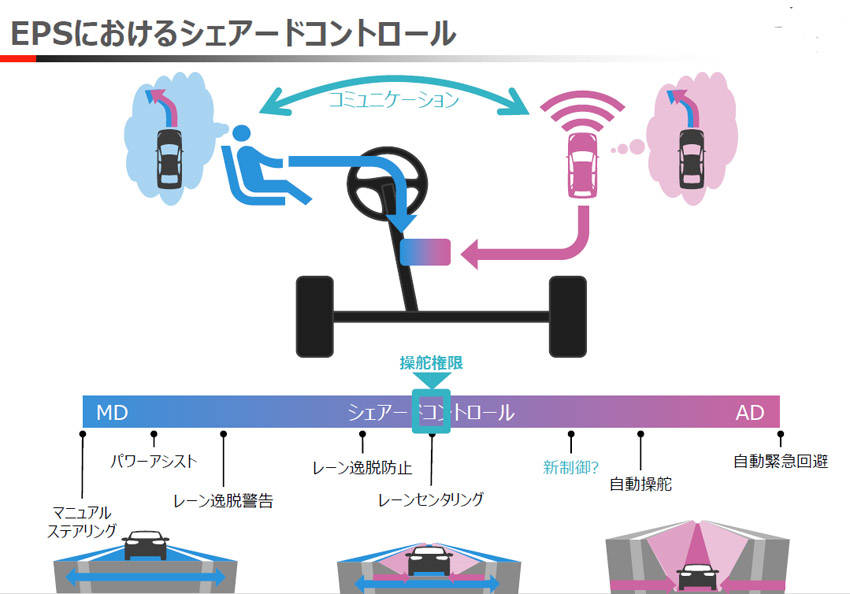
シェアード・コントロールの概念
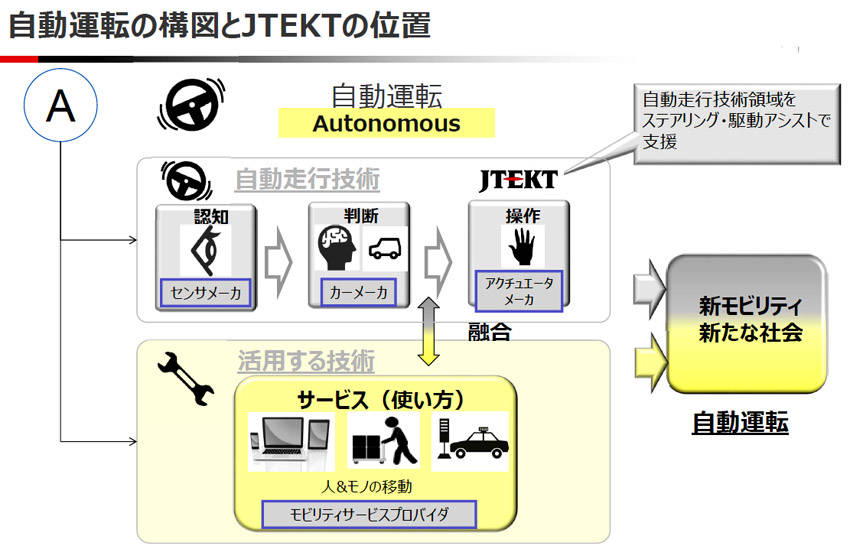
ここで、ハプティック・シェアード・コントロールについて詳しく説明すると、用語の意味は、パワーステアリングを介して、自動運転をドライバーが感じることができることをいう。レベル3の自動運転では、車両システムによる自動運転と、ドライバーが運転するの2モードがある。この2モードを両立させるという意味の用語で使われている。
それぞれのモード間で、どのようにスムースに移行させるかということが研究テーマで、レベル3の自動運転で自動モード、手動モードをいかに違和感なく的確に切り替えることができるかが課題で、まさにマシンと人間のインターフェースの問題である。
ジェイテクトでは、ステアリング分野での研究を進めており、自動運転/手動運転の切り替えでのヒューマン・マシン・インタフェース(HMI)、さらには自動運転の権限が完全にドライバーに移行せず,ドライバーの操作と自動運転システムの両方の権限が混在する場合には、車両システムの走行意図をドライバーに理解させ、両方の操作入力を協調して安全な走行を実現することの探求も行なっている。
FF用トルセンLSDのタイプDを開発
トルセンLSDは、現在ではFR車のリヤデフ用のタイプB、縦置きエンジン4WD車のセンターデフ用のタイプCが知られているが、今回は開発中の小型軽量化したFF車のフロントデフに組み込む新しいトルセンLSD「タイプD」に試乗した。
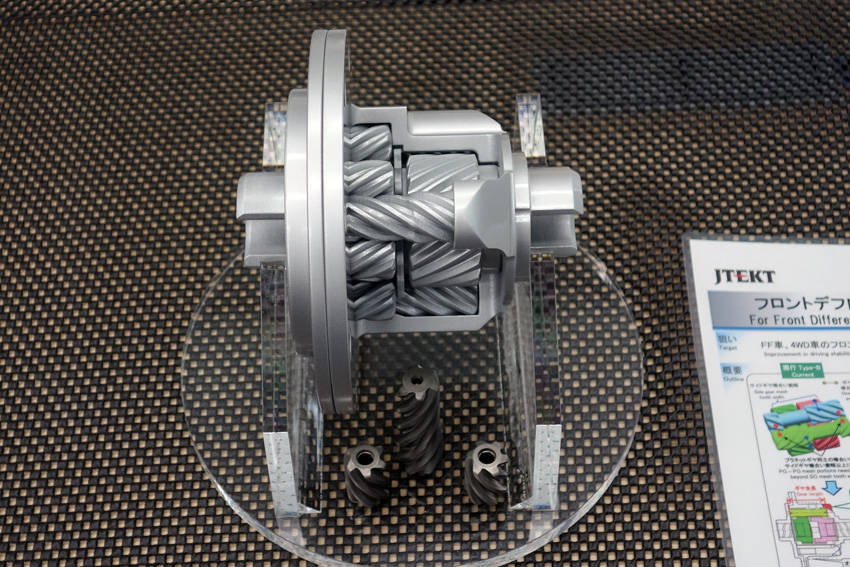
FF車のデフ/トランスミッションは横置きでコンパクトにまとめられているため、従来のタイプBはサイズ的にフロントデフに装着できなかった。そのため、「タイプD」は構造を改良し、よりコンパクト化してFF車に対応している。
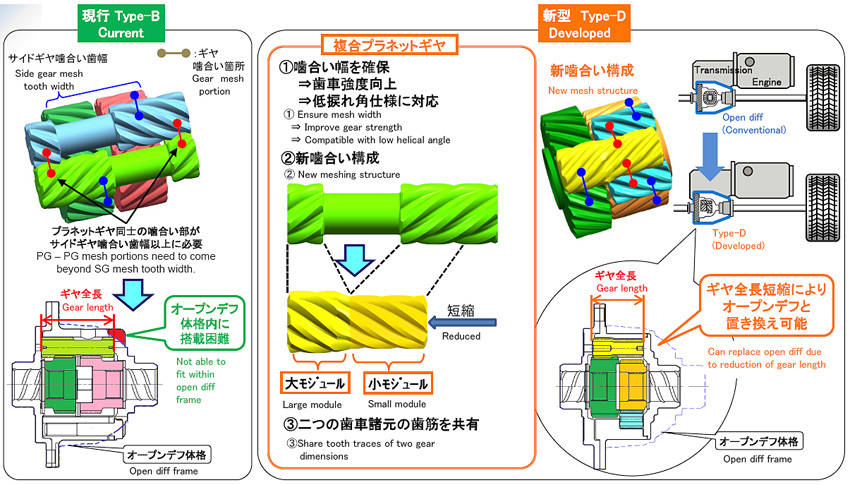
実は、このタイプDは単にFF車に装着できるというだけではなく、今後増大する電動車にも最適なのだ。モーター駆動の電動車は、発進直後からエンジン車より駆動トルクが大きく、駆動輪がスリップしやすくなる。そのためトルセンLSDは有効なのだ。
トルセンLSDを装着することでトラクションコントロール介入を抑え、よりモーターのトルクを有効に使用することができる。またトルセンLSDは、ABSやESC、トラクションコントロールの機能を妨げないという特長もあり、次世代のクルマにとって、より存在価値が大きくなると考えられている。そのため、フロント・デフにも、リヤ・デフにも装着できるタイプDは今後、よりクローズアップされることが予想される。
大パワーのFF車でテスト試乗
試乗車は、北米仕様のカムリで、日本では設定されていない3.5L・V6エンジン搭載モデル。パワーは305ps/380Nmと強力なFFモデルだ。まずは、LSDなしのオープンデフのカムリで、片側の路面が氷上路面と同等の低ミュー路面(ミュー:0.1)、片側がウエット路面(ミュー:0.3)というスプリット路面での発進から。

アクセルを踏み込むと当然ながら氷上路面側のタイヤが激しく空転し、結果的にほとんど加速しない。アクセルの踏み込みを緩めると、ようやく動き出すという感じだ。もちろんこの状態でハンドルを切っても車両は反応せず、操舵が不可能な状態だ。
さらにウエット路面のコーナリング、スラロームなどを試すが、大きくアクセルを踏み込めば片側輪が空転しやすく、スラロームでも急激なステアリング操作に対して応答が遅れ、アンダーステアが強い状態となり狙った走行ラインを維持するのが難しい。

次は、トルセン・タイプDを組み込んだカムリに乗る。同様にスプリット路面では、アクセル・ワークにさほど注意しなくても、片側輪はわずかにスリップしただけで発進でき、その状態で操舵してもハンドルを切った方向に加速することができた。これは誰が運転しても実感できるLSD効果だ。

ウエット路でのコーナリングやスラロームも、とても滑らかでアンダーステア状態を感じることなく走り抜けることが実感でき、FF車におけるトルセンLSDの効果は想像以上に大きかった。また、機械・多板式のLSDのような機械的な抵抗感や、違和感がなく、ドライバーが体感できないほどリニアに作動する点もトルセンLSDのメリットだ。
ダイナミック・トルクベクタリングAWDを開発
2019年4月に発売された新型RAV4の2.0Lエンジン搭載モデルには、トヨタ初のダイナミックトルクベクタリングAWDが採用されて話題となった。この駆動トルクベクタリングは、通常の後輪へのトルク配分を行なうジェイテクト製の電子制御4WDカップリング(ITCC)を装備するだけではなく、リヤの左右輪にも電子制御4WDカップリング(ITCC)をそれぞれ組み込み、リヤの左右輪でもトルクを0〜100%の範囲で配分する。つまり駆動トルクベクタリングを行なうことができるのだ。
ダイナミック・トルクベクタリングには、フロントのトランスファー部と、リヤ・デフ部のそれぞれに電磁式の断続用ドグ・クラッチを備えている。舗装路などではFF状態で走行し、前後のクラッチを切ることができる。
したがってプロペラシャフトも回転しない状態で走行ができ、駆動損失を低減して燃費を向上させている。この前後の駆動力を切断するクラッチを装備した、駆動トルクベクタリング・システムは世界初のシステムとなる。ジェイテクトは電子制御4WDカップリング(ITCC)と、電磁式ドグクラッチを開発・製造している。電磁ドグ・クラッチのレイアウトと耐久信頼性の確保に苦労したという。
RAV4で比較試乗
今回の試乗では、前後の駆動トルク配分を行なうITCCを1個装備した3代目RAV4と、ダイナミック・トルクベクタリングAWDを備えた最新の5代目RAV4との比較試乗だ。半径10Rの定常円旋回で、車速は15km/h〜30km/h。ハンドルは180度ほど切った状態で15km/hから緩加速して行くというもの。
3代目RAV4は、予想通り15km/hから加速すると車速のアップと連動して強いアンダーステア状態となり、10Rの円から大きく逸脱し、外側にはみ出す動きとなる。典型的な4WDアンダーステアの状態だ。

最新RAV4に乗り換えると、加速するにつれて、ニュートラル・ステアではなく内側に車体が切れ込むように旋回する。旧型RAV4と比較するクルマの動きは180度違うことに驚かされる。新型RAV4はステアリングの動きに忠実に反応するとも言えるし、通常のクルマの弱アンダーステアではなく、アクセルの動きにに連動した、かなり強い切れ込みモーメントを発生するとも感じられた。
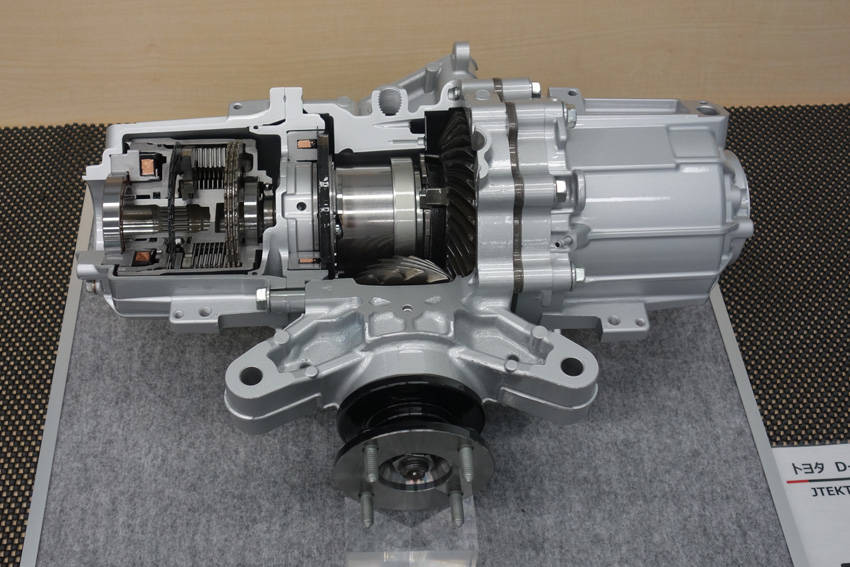
E-AWD リヤ用電動アクスル搭載モデル
E-AWDは、ジェイテクトが開発している後輪駆動用の電動アクスル・ユニットで、FF車に搭載することでプロペラシャフトなしのAWDを実現することができる。
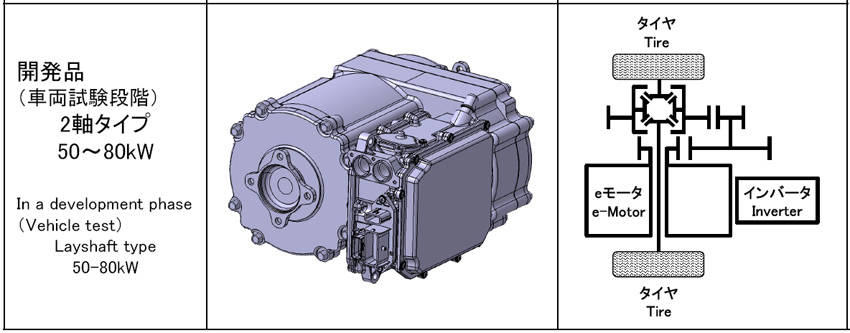
このシステムは、モーター、減速ギヤ、デフ、インバーターなどを一体化した機電一体型駆動ユニットで、モーター出力は25kW〜100kW以上まであり、様々なバリエーションが想定されている。
今回のデモ車両は日産ノートe-POWERだ。これに出力40psの後輪駆動用のモーターユニットを組み合わせた仕様に改造されている。e-POWERの出力は108ps、リヤモーターの出力が40psのため、合計駆動力はかなり強力だ。
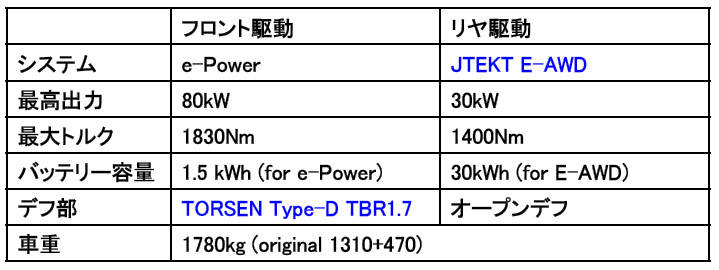
ちなみにこの試作車は、フロント・デフにはジェイテクトのトルセンLSD(タイプD)が装着されていた。
機電一体型駆動ユニットのテスト試乗
試乗はウエット路での発進、スラロームで車両の挙動を体験する。最初はモーターによるリヤ駆動はオフの状態、つまりFFでの発進やスラロームを体験する。フロントにトルセンLSDを装備しているとはいえ、ウエット路でアクセルを強めに踏むと、やはりフロント・タイヤが空転するので、少しアクセルを緩めてコントロールする必要がある。またスラロームでは、リヤが重いこともあって応答が遅れ、アンダーステアの傾向が強く感じられた。

次にリヤのモーター駆動をオンにしAWD状態にする。するとラフにアクセルを踏み込んでもウエット路面上でも難なく加速することができた。さらにスラロームでもステアリングの操舵とアクセルの踏み込みに車両が忠実に応答し、濡れた路面の上でも意のままの走りを体感することができた。ウエット路面でのAWDの威力は絶大である。
今回の試乗を通じて、サプライヤーは今では自動車メーカーと同等か、それ以上に迫り来るCASE時代に備え、どのように取り組むか、どのようなシステムやユニットを先行開発するかを決断する分水嶺にあることが理解できた。量産実現に向けてリソースを投入し、開発を加速させ、自動車メーカーにプレゼンテーションするというサプライヤーの役割の重要性は、従来以上に高まっているのである。<レポート:松本晴比古/Haruhiko Matsumoto>













