トヨタと建設機械メーカーのコマツは2023年5月17日、鉱山現場のライトビークルの自動化を目指し、無人ダンプトラック運行システム(Autonomous Haulage System:AHS)上で自動走行するライトビークル(Autonomous Light Vehicle:ALV)の開発で協業を開始すると発表した。

資源の安定供給のため、鉱山の現場では長時間稼働が求められ、厳しい自然環境下の過酷な労働条件でオペレーターなどの人材不足が課題となっている。また、多くの機械が稼働している鉱山現場では、さらなる安全性向上のため、人的ミスによる事故の削減も求められている。
コマツは2008年に世界で初めてAHSを商用導入して以来、鉱山現場ごとに異なる運用環境で稼働実績を蓄積し、世界各国の資源大手より安全性・生産性に対して高い評価を得ている。また現在、AHSの管制下においては、鉱山現場の走路に、無人ダンプトラックと、鉱山内での作業員の輸送や保守点検に携わる有人ライトビークルとが混在して走行している。現状では、人的ミスによる衝突を避けるため、すれ違い時に無人ダンプトラック側が減速、または停止するしくみを取り入れることで、最優先課題である安全性を確保している。しかし一方で、無人ダンプトラックの稼働効率という観点からは、オペレーション全体の生産性に関しては課題を残していたのだ。
両社は、この課題を解決することが急務であるという考えから、鉱山オペレーション全体の自動化・自律化推進にともに取り組むこととなった。コマツは、AHSの管制システム上にALV用管理プログラムを新たに開発し、トヨタは乗用車で培った自動運転技術を応用し、AHSの管制システムからの指令により自動で走行するALVを開発する。
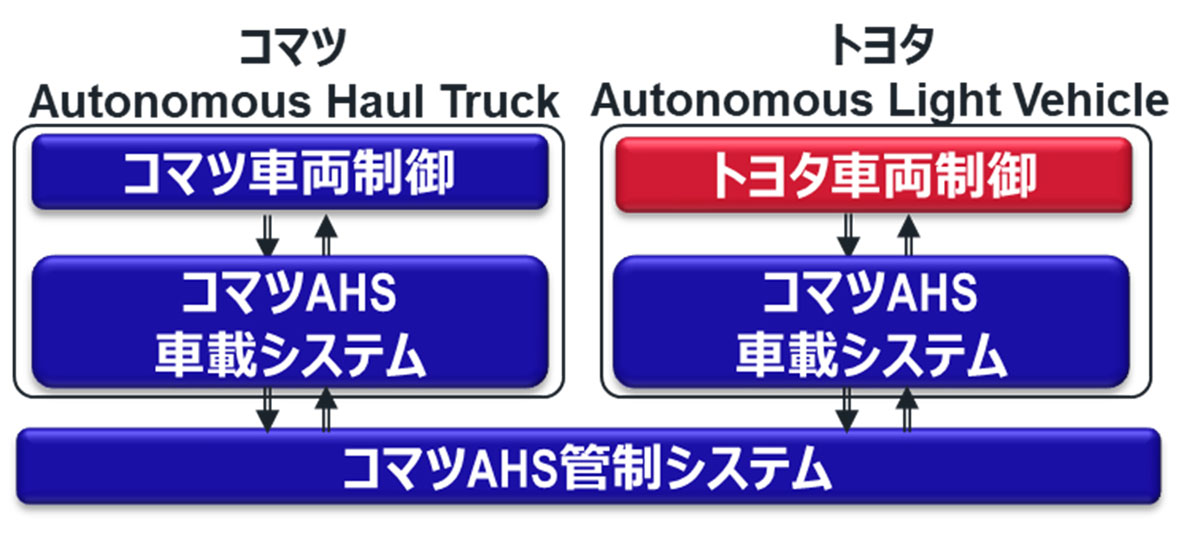
具体的には、鉱山現場においてコマツ製無人ダンプトラックと、トヨタ製ALVをコマツのAHS管制下で協調制御することにより、鉱山オペレーション全体の安全性と生産性を向上することを目指す。
指示された走行経路に沿ったALVの安全な運行を実現し、従来のライトビークルの有人運行時と比較し、ドライバーの運転ミスによる接触事故を防止する。またライトビークルとすれ違う際のダンプトラック側の停止や減速時間(ダウンタイム)を削減させる。トヨタ製ALVの自動走行により、安全性・生産性に寄与するさらなる機能改善・追加を推進する。例えば、鉱山内で稼働する鉱山機械部品輸送の自動化、積み込み機・ブルドーザーなどを運転するオペレーターの自動送迎の機能などが想定されている。
無人ダンプトラックとALVを、コマツのAHS管制下で協調制御して自動走行させることで、鉱山現場のさらなる安全性と生産性向上の実現を目指すことになる。現在、コンセプト車両にて試験を実施しており、今後2024年1月頃を目途に、鉱山の現場での実証実験を開始する予定としている。













