トヨタの自動運転ソフトウエアの先行開発を行なうトヨタ・リサーチ・インスティテュート・アドバンスト・デベロップメント株式会社(TRI-AD)と、新しい宇宙業界をリードしているマクサー・テクノロジーズ社(Maxar)、そして日本のITサービスを牽引するNTTデータ社は、高解像度の衛星画像を用いた自動運転車用の高精度地図の自動生成に向けた実証実験を3社共同で行なうことを2019年4月25日に発表した。

市街地の自動運転実現に向けて
この取り組みは、自動運転を実現するためにAutomated Mapping Platform(AMP)という、TRI-ADのオープン・ソフトウエアプラットフォーム構想を前進させる大きな一歩となる。
自動運転を実現するためには、多数の車載センサーを装備するが、これらのセンサーを用いた自動運転の基盤データとして高精度な道路地図は不可欠とされる。現状では高精度地図がカバーしているのは、全世界の道路ネットワークの1%未満(先進国の主要高速道路の割り合い)のため、自動運転社会実現のためには市街地や地方道路まで範囲を広げる必要がある。
今回発表された実証実験では、正確な衛星画像で生成した高精度地図を元に、自動運転用ソフトウエアが複数のデータソースを参照した上で指示を送り、自動車が安全に対処できるようにすることを目指す。
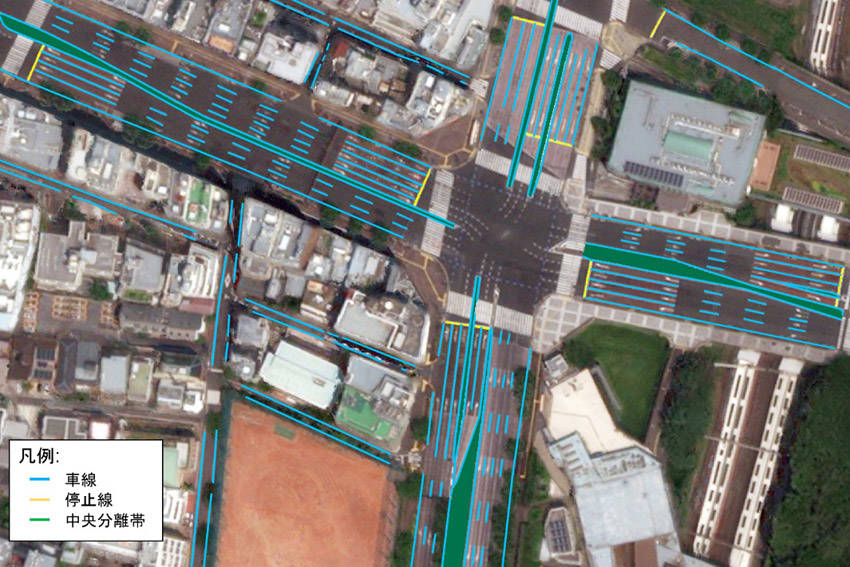
具体的には3社の協力で、衛星画像を加工し車両に使いやすい高精度地図を生成する。まずMaxarのクラウドベースの地理空間情報クラウド(GBDX)から光学衛星画像ライブラリーの画像を取得し、次にNTTデータの人工知能(AI)を活用した独自アルゴリズムにより、道路ネットワークの作成に必要な地図情報を自動抽出。そして、TRI-ADが自動運転用に作成した高精度地図をクラウド環境からトヨタの自動運転試験車へ配信するという手順だ。
今後、3社は東京の特定エリアから高精度地図を自動生成することを重点的に取り組み、将来的には広範囲な道路にまで対象を拡大し、自動運転を実現する基盤にするという。
また、自動運転のベースとなる3次元デジタル高精度地図は、ヨーロッパのHERE社、TOMTOM社、日本では自動車メーカーや関連技術メーカーが合同した「ダイナミックマップ基盤」社なども取り組んでいる。













