トヨタとNTTドコモは2018年11月29日、第5世代の高速移動通信方式(5G)を使用したロボット制御のトライアルを開始し、遠隔地間(約10km)を想定した実験で、その一部区間に5Gを活用し、トヨタが開発したヒューマノイドロボット「T-HR3」を制御することに成功したことを発表した。

ヒューマノイドロボットのT-HR3は、家庭や医療など様々なシーンで人々の生活を安全にサポートするパートナーロボットをめざして開発されている。トルク(力)を制御するトルクサーボモジュールと、全身を自在に操るマスター操縦システムなどにより、操縦者はT-HR3にかかる外力を感じながら、操縦者と同じ動きをさせることができるようになっている。
T-HR3のやさしく、しなやかな動きを実現するためには、T-HR3とマスター操縦システム間で制御信号をやり取りする際に発生する、通信遅延をなるべく少なくすることが求めらるが、これまでは比較的通信遅延の少ない有線接続での実験を進めてきた。そして、より実用性の高い環境での使用に向け、ドコモがこれまでに培ってきた5Gの知見を活かしながら、5Gの特徴の1つである低遅延性を活用し、無線接続を一部を含む遠隔地間を模擬した環境でT-HR3の制御に成功した。
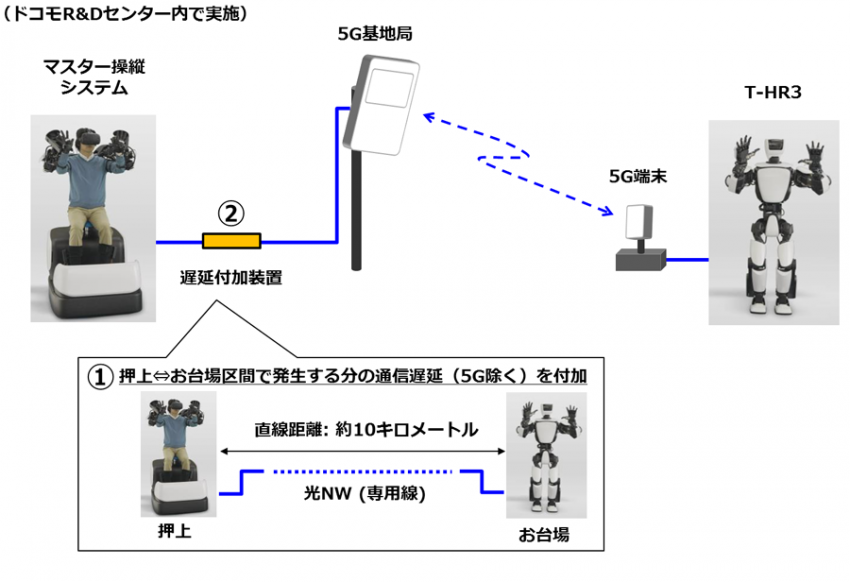
今回の実験は、神奈川県横須賀市のドコモR&Dセンター内で実施され、5Gの周波数帯として28GHz帯を使用。実証にあたり、遠隔地間(直線約10km)の5G区間以外で発生する通信遅延をセンター内で模擬するため、事前にお台場エリアと東京スカイツリー(押上)間の有線接続の遅延時間を計測し、そこで実測した遅延時間を遅延付加装置に加えた。
そこに5G基地局と5G端末を介し、無線でT-HR3を制御できることを実証したのだ。具体的には、「ボールを両手で挟んで持つ」、「ブロックをつまむ、積み上げる」、「人と握手をする」などの力の伝達が必要となる動作を、有線接続時と遜色ないレベルで行えることを確認した。
なお今回の実験は、2018年12月6日から2日間、東京ビッグサイトで開催予定の「DOCOMO Open House 2018」の会場と東京スカイツリー間でのデモンストレーションを行なう予定だ。













