この記事は2018年1月の有料記事です。一般無料公開にしました。
2018年1月5日、トヨタはアメリカで人工知能や自動運転技術の研究開発を行なうToyota Research Institute, Inc.(TRI)が、次世代の自動運転実験車「プラットフォーム3.0」を、1月9日から開催されるCES 2018に出展すると発表した。
■トヨタの自動運転技術の本格開発の始まり
このプラットフォーム3.0(意味は、自動運転技術開発のためのプラットフォームで、フェーズ3に入ったことを意味していると考えられる)はレクサスLS600hL(旧型)をベースとし、これまでより高度な技術とベース車両のスタイリングに調和したデザインを兼備した自動運転実験車だ。

TRIのCEO兼トヨタのフェローを務めるギル・プラット氏は、「TRIの開発チームは、自動運転車両の研究開発能力を再び、急速に引き上げたといえるでしょう。自動運転実験車の能力を新たなレベルに引き上げるため、トヨタのエンジニアリングとデザインの能力を活用し、機能面・スタイリングの両面でベンチマークとなりうる新しい実験車を造り上げました」と語っている。

TRIは、新しいフェーズに入った自動運転実験車の開発にあたり、3つの主要なテーマを掲げている。 外部認識能力を向上させ、数ある自動運転車両の中でも業界をリードする性能を持つこと、センサー類をクルマのデザインと調和させ、スマートで美しい外観とすること、自動運転技術に関する装備類を一体のパッケージとしてまとめ、複数の実験車を容易に製作できるようにすることだという。
プラットフォーム 3.0は、TRIの自動運転車の研究開発が高いレベルに達していることを証明するために、テストを通じて自動運転技術の装備をコンパクトにパッケージ化し、センサーの設定をより明確化。車両周囲の認識能力を大幅に引き上げることにより、自動運転のパフォーマンスレベルを引き上げているのだ。
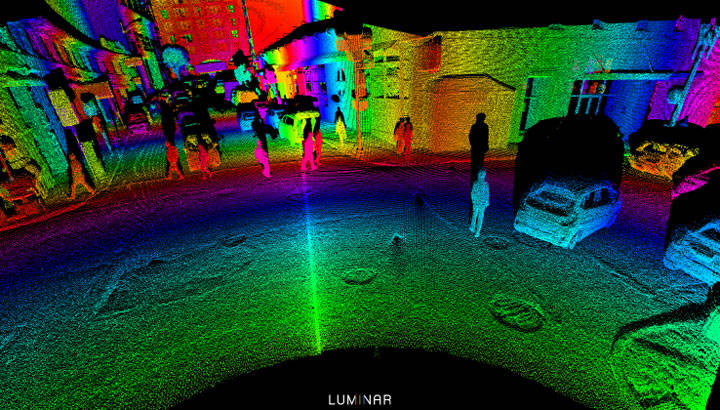
■新しいベンチャー企業「ルミナー」と提携
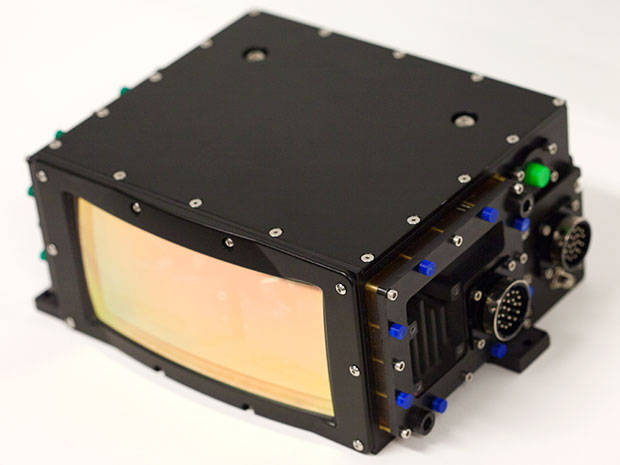
プラットフォーム 3.0 実験車は、多数のセンサーを搭載し、現存する各メーカーの自動運転実験車両の中でも外部環境の認識能力の高い実験車の1台になっているという。じつはTRIはアメリカの新しいベンチャー企業「Luminar(ルミナー)」社(後述)が新開発した200m先まで物体検知が可能なLIDAR(ライダー)システムを新たに採用し、従来のTRI実験車では前方のみの認識可能だったものを、この実験車では外周360度の認識が可能な仕様としているのだ。4個の高解像度LIDARにより、従来は検知・認識が難しいとされる暗い色の物体を含めて、車両の周囲の物体を3次元で正確に検知できるようになっているという。
また、短距離LIDARを車両のフロントフェンダーの両側と前後バンパーの四隅に装備。これらのLIDARにより、小さな子供や道路上の障害物など、低く小さい対象物を検知することが可能だ。

プラットフォーム3.0にLIDER類を搭載するにあたり、センサー類のパッケージデザインは、ミシガン州アナーバーのCALTY Design Research(CALTY)のメンバーと、Toyota Motor North America Research & Development(以下、TMNA R&D)のエンジニアのノウハウを取り入れ、センサーやカメラ類をコンパクトにまとめ、外観からは見えないようにしているのも大きな特徴だ。
従来はLIDER類や他のセンサーがルーフ上に剥き出しで取り付けられ、デザイン的な要素はまったくなく見るからに実験車であったが、デザイン的に工夫することで、実用段階に一歩近づいたように見えるのだ。

CALTYは、このカバーのデザイン・コンセプトを「インテリジェント・ミニマリズム」と名付けている。そのデザインはオフロードバイク用のヘルメットのデザインをモチーフにして、前方の部分はかっちりとしたテクニカルなデザインとし、空力特性も踏まえた後端部につながってLSのボディーラインと一体化している。そして、このカバーにはルーフラインにつながるサイド部分に、メッキ加飾を施している。
また従来はトランクスペースのほとんどを占領していた自動運転用コンポーネンツを制御するコンピュータシステムも、大幅に小さくまとめている。コンピュータや記録装置、ワイヤーの取り回しなど、従来トランクスペースを占領していたパーツはすべてLEDで光るTRIロゴ付の小さなボックスに収納されている。

プラットフォーム3.0の製作は2018年春から開始されるという。ミシガン州ヨークタウンシップにあるトヨタの試作車開発センターで制作される。制作する台数はTRIがテスト車の機構のアップデートをよりすばやく実施できるように、あえて少数にとどめている。これまで通り年に3回程度のアップデートを行なう計画だという。
新たに製作されるプラットフォーム3.0実験車の一部は2017年夏にTRIが公表した「デュアルコックピット・コントロール・レイアウト」(左右席両方にハンドルがある実験車)として製作される。これは「ガーディアン」モード(高度安全運転支援)のために、実際のテストドライバーと、バックアップ用の「安全なドライバー」である自動運転システムの間の移行を効率的に行なう方法をテストするためのものだ。ただし、CES 2018に出展されたプラットフォーム3.0はシングル・コックピットで、もっぱら自動運転技術を開発するベース車両となっている。
■トヨタの新たな開発の構図
既報のように、2017年9月28日にトヨタ・ノースアメリカ本社で行なわれた投資家向けイベント「Toyota Investor Summit」で豊田章男社長は、これからの自動運転、ロボティクス、次世代パワートレーン、コネクテッド技術など、現在トヨタが想定している未来のモビリティ像を公表し、そのビジョンを実現するために全力で取り組むことを公約した。
このトヨタの決断により、これまで優柔不断とも見えたパワートレーン電動化戦略を発表し、新たに電気自動車のプラットフォームや車両企画を行なう新会社「EV C.A.スピリット」社を立ち上げ、今回の自動運転技術開発のためのプラットフォーム3.0もまたそのビジョンの一環である。
これまでTRIは研究開発に専念してきたが、プラットフォーム3.0からは北米トヨタ開発センターやデザインセンターなども参画し、これら開発部門が一体になって自動運転技術に取り組むという新たな体制も構築されたことがわかる。
またその一方で、トヨタ系列のデンソー、アイシン、JTEKT、パナソニックを筆頭に、有力サプライヤーもそれぞれが自動運転技術の開発のスパートをかけており、TRIが中心となっている自動運転技術の開発に合わせて、直ちに量産可能な主要コンポーネンツを供給できる体制を築きつつあり、トヨタ本体としての開発とサプライヤーの関連技術の開発が同期し始めたともいうことができる。
こうしたことからもわかるように、トヨタはようやく腹を据えて新たな時代に向かう体制を整えたと理解するのが妥当だろう。
■注目を浴びるLIDAR
TRIは、新たな開発のベースとなる実験車、プラットフォーム3.0を製作するにあたり、ベンチャー企業の「ルミナー・テクノロジーズ」と技術提携している。このルミナー社の創業者であり社長は22歳のオースティン・ラッセルだ。

ラッセルCEOは、7年前に入学してからから数カ月でスタンフォード大学を中退し、LIDARの開発を独力で行ない、2017年秋に「ルミナー・テクノロジーズ」を創立した。同時にTRIと業務提携。現在はフロリダ州とカリフォルニア州パロアルトの近郊に拠点を置き、合計250人の従業員を抱え、新しい高性能LIDARのハードウェアを月産100ユニット規模で製造を開始している。
LIDARとは、英語でLight Detection and Ranging、またはLaser Imaging Detection and Ranging、の頭文字で、「レーザー画像検出と測距」、つまり物体を認識するための画像と、それらの物体までの距離を計測するシステムだ。構造的には、レーザー光をレーダー電波のように周囲に放ち、そのレーザー光の照射により物体を検知し、また反射時間により距離を測定するシステムだ。
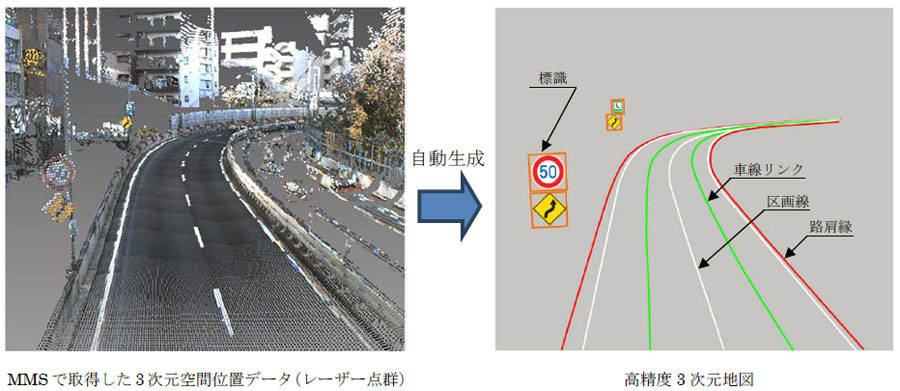
従来は軍事用、産業用、科学技術用など限定的に使用されてきたが、カメラとレーダーの両方の機能を兼備し、夜間でも有効であることや、物体を3次元形状で検知・認識できることなどから、高精度なデジタル3次元マップの製作のために、そして自動運転車のための高性能センサーとして認知されてきた。

アメリカではヴェロダイン、ヨーロッパではIBEO(イベオ:販売はヴァレオ)がよく知られているが、日本でも三菱電機などが大型LIDARを、また自動運転用に特化した小型LIDARではパイオニア、オムロンなども開発を進めている。
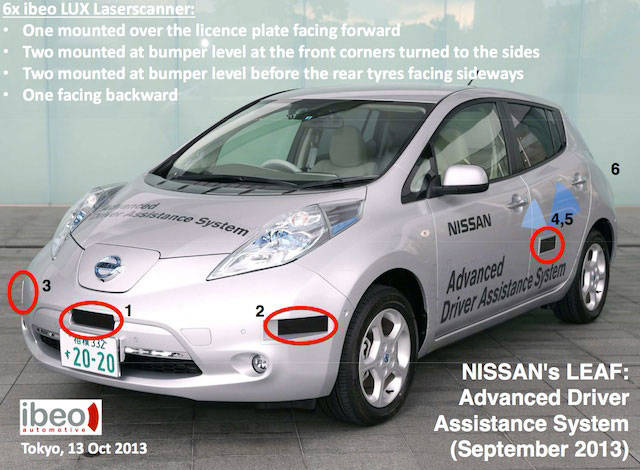
今回のプラットフォーム3.0は新しいルミナー製のLIDARを採用しているが、自動運転技術開発で先行している日産は、IBEO製を採用するなど各社の実験車はほぼLIDARを装備するのが常識化している。ただし、先頭を切って自動運転技術を開発しているメガサプライヤーは、LIDARがきわめて高価なため、従来からのセンサー類を駆使して開発を進めているという一面もある。

LIDARが脚光を浴びる端緒になったのは2004年~2007年のDARAP(アメリカ国防高等研究計画局)【https://autoprove.net/automobile_study_group/its/144470/】による荒野、市街地での完全自動運転競技会で、これらに参加した各大学の参加車両は多数のカメラやレーダーセンサー、GPSアンテナ、そして多数のLIDARを装備していた。こうした競技会に参加したスタンフォード大学の研究メンバーの一人が、TRIのギル・プラット氏である。

車両用のセンサーとしてのLIDARはレーダーよりも精度が高く、カメラとは違って周囲の光に依存しない優秀なセンサーだが、かつては車両用には想定されていなかったこともあり大型で、超高価である。もちろん最近は各メーカーにより車両用に小型化が進んでいるが、大型の高精度LIDARは2000万円以上、小型のLIDARでも100万円~数100万円というレベルにあるのが実情だ。
そのため、テスラのイーロン・マスクCEOなどは「LIDARはコストが高過ぎるため、乗用車に搭載できる日は来ない」と断言し、高性能なカメラと人工知能(AI)により、安全に自動運転が実現すると主張している。それに対してルミナーのオースティン・ラッセルCEOは「そんなことは100年後でないと実現しない」と反論している。
ルミナーのLIDARは検知距離が200mと、競合品と比べて10倍近く遠くまで検知でき、解像度は50倍だという。また他のLIDARより長い波長のレーザー光を使用しているため、反射率が低い黒っぽい物体を、従来の倍の距離まで対象物検知でき、早期に検知できる分だけ、早目に自動運転システムが対処する時間的な猶予が与えられるわけだ。
しかし高性能なルミナー製のLIDARは価格的にも決して安くはないはずで、低コスト化を進めている他のLIDARメーカーとの競合は、ある意味興味深い。今後もLIDARの動向も注目しておきたい。













