三菱自動車は、発売するすべての4WDモデルに対し、「ある考え方」を持ってこだわりの制御を行なっている。そのある考え方というのはAWC=All Wheel Controlで4輪全てを制御するということだが、概念の基本はチーターとかヒョウとかライオンとか、4つ足動物は4本の足を自在に使ってコーナリングし、加速、減速している。そのイメージのように、4つのタイヤを精緻に制御するということへのこだわりだ。

三菱は1987年にギャランVR4へ搭載した4WD技術をスタートとして、AWC=all wheel controlという開発技術コンセプトで進められている。そして2007年のランサーエボリューションXに搭載した制御からS-AWCとし、車両運動統合制御システムとして現在も進化、継続して搭載する技術を確立している。
制御開発の考え方がAWCであり、その考え方をベースに開発された技術がS-AWCであり、最近ではエクリプス クロス、アウトランダー、アウトランダーPHEVなどのモデルに搭載されている。では早速の制御技術を見てみよう。
3つの制御因子で構成するS-AWC

S-AWCは3つの分野で車両の統合制御を行なっている。
1:前後輪間でのトルク配分
2:左右輪間でのトルク配分
3:4輪ブレーキコントロール
の3つ。
1:前後輪間トルク配分変更方法
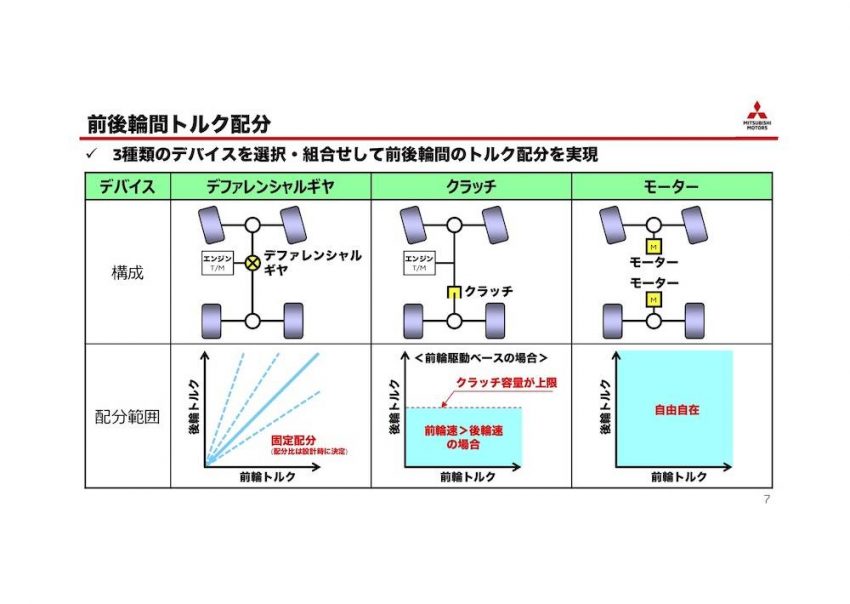
前後輪間でのトルク配分のやり方は3種類あり、センターデフを装備し前後にトルクを配分する。その際、単純なギヤによる機械式ではトルク配分は固定され、タイヤと路面の摩擦変化に対応した前後トルクの変動はできないネガがある。
次に、FFをベースとして考えた場合、前輪のトルクを後輪に伝えるためのクラッチ(カップリング)を装備して配分する方法。この方法は三菱に限らず各社が採用する仕組みで、オンデマンド4WDと呼ばれるタイプはこのカップリング方式を採用しているケースが多い。

カップリングでは後輪にトルクを伝えられる容量はそのクラッチ容量が上限となるため、エンジンの出力トルクを全て後輪へ伝達するのは難しい。なぜなら、トランミッションに連結されるクラッチと同等の容量、サイズが必要となるわけで、その大きさのクラッチを車体下に設置することはできない。さらに、エンジントルクが効率よく後輪にトルク移動できるのは、フロントタイヤが後輪より速い速度で回転している時だけに限られるというネガがある。
また、アッカーマンジャントージオメトリーの影響があり、ある速度域で後輪車速が前輪車速を上まわった時、アンダーステアとなる。するとクラッチを切り100:0の駆動配分とすれば、そのアンダーステアは解消される。だが、三菱ではそうした考え方ではなくAWCの思想のようにヨーレートセンサーからの情報をもとに後輪の駆動力をゼロにすることなく、4WD制御している、というのが特徴でもある。
※関連情報:アッカーマンジャントージオメトリー
そして、前後輪に独立したモーターによる前後トルク配分の手段がある。これは自在に出力特性をコントロールできるモーターならではの特徴となる。
2:左右輪間トルク配分変更方法
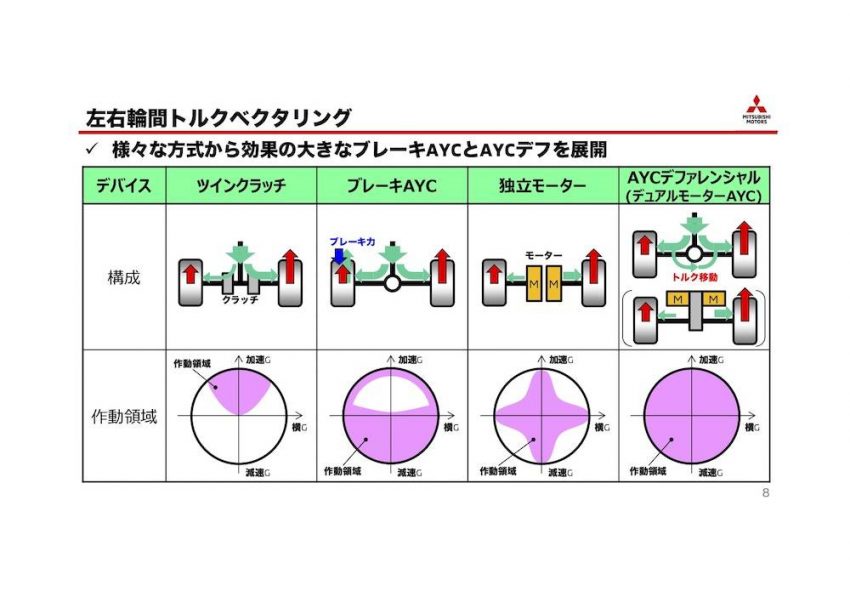
次に、左右輪間のトルク配分変更の手段として、駆動輪に独立した2個のクラッチを装備し、左右の駆動力配分を変更する方法。こちらの作動領域は駆動時に限られ減速時のトルク配分は不可能だ。
ブレーキAYCという方法。これはデフで等配分されたトルクを片方の車輪にブレーキを掛けることで、左右の駆動力に差をつける方法。これだと加速、減速、コーナリング時に左右輪間のトルク変動が可能になる。
左右に独立したモーターを設置し、それぞれで駆動力を決める方法。この方法は自在にそして加速、減速、コーナリング時にもトルク配分ができるが、クルマで考えた場合、減速させるブレーキ制御との組み合わせは必須になる。
そして三菱独自のAYCデファレンシャルがある。これは、一旦等配分されたトルクをデフで左右間のトルク配分を変更する方法だ。理論上全領域で作動することになる。
間違えやすいブレーキAYC

混同しやすいブレーキAYCと4輪ベクタリクリングブレーキの違いは、共に1輪のブレーキをつまんで旋回ヨーを発生させる方法だが、ブレーキAYCは駆動力を均等にかけながら、片方にブレーキをかけて回転差を作り旋回ヨーを発生させている。ベクタリングブレーキは、タイヤの回転差を出し旋回ヨーをだすために減速ブレーキを片方にかける方法。共に、旋回ヨーモーメントは発生するものの、駆動と減速の違いがある。
そして三菱のS-AWCの特徴だが、これらの駆動力配分の仕組みを巧みに組み合わせ、常に、トラクション制御、旋回制御、安定制御が組み合わされていることだ。
一般的にはこれらの制御が必要とされる状況によって、必要な制御が個別に働くようになっており複数の制御が同時に働きながらコーナリングしていくのが三菱の4WDの特徴でもある。
3:4輪ブレーキコントロール
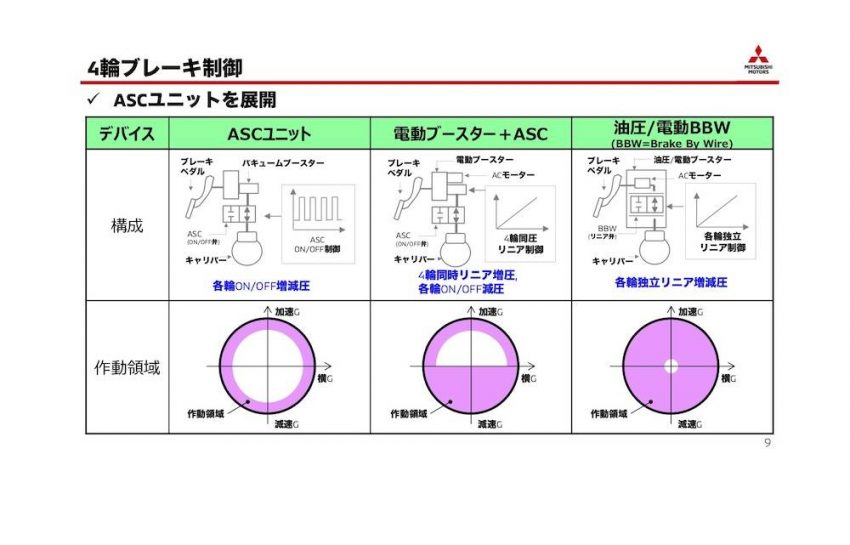
三菱はASC=active stability controlと呼び、車両の姿勢制御をブレーキで行なうものだ。これは作動領域で接地荷重が薄い加減速、横G発生時だけに限られる制御になる。
二つ目の方法として、このASCにプラスして電動ブースターにより負圧を高め、減速時の接地荷重が高い場合でも制御が可能になる。だが、加速時はASCだけの制御と同様だ。
そしてもう一つは油圧/ブレーキバイワイヤで、エンジンに関係なく電動モーターで負圧をあげてコントロールする方法。電気駆動車などICE(内燃機関)を持たない車両には必須の技術で、かつ、作動領域もICEに影響されないので、加減速時でも制御が可能となる。
こうした3項目をそれぞれの制御技術によって車両運動統合制御が行なわれているのが三菱の4WDの特徴であり、こうした背景には開発思想の取りまとめである澤瀬博士の存在が大きい。澤瀬氏は三菱自動車で車両制御開発を行ない、ランサーエボリューションのAYC開発が有名だ。その後大学で博士号を取得。三菱自動車に復帰し4WD開発の礎を築いている。もちろん現在も開発の最前線で活躍している。
では次に車両ごとに搭載されている制御を具体的に見てみよう。
NEXT:エクリプスクロスの4WD制御
エクリプスクロスの4WD制御
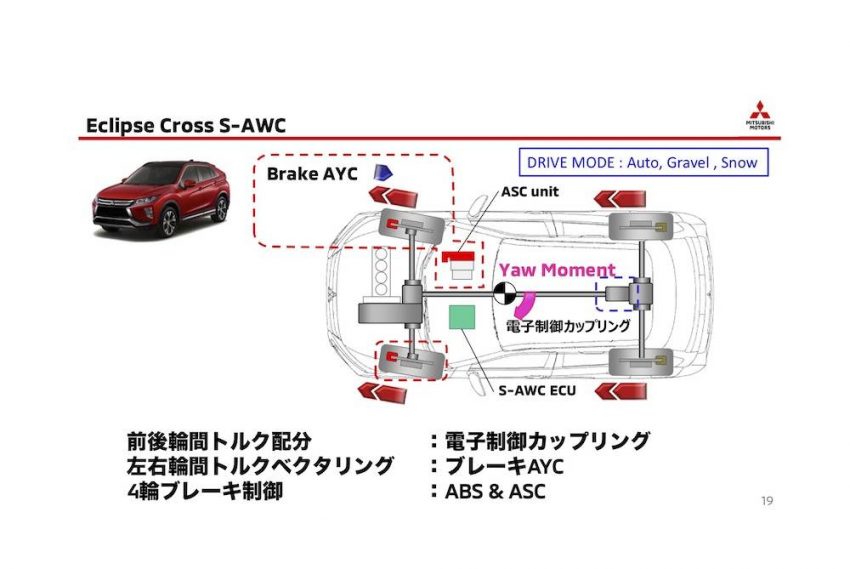
車種別に見てみると、エクリプスクロスに搭載されるS-AWCは上記の前後輪間トルク配分、左右輪間トルクベクタリング、そして4輪ブレーキ制御が行なわれ、前後のトルク配分はカップリングで(クラッチでコントロール)される。そして左右のトルク配分はブレーキAYCがフロントタイヤで働き、均等配分されるトルクを旋回方向内側のフロントタイヤだけにブレーキをかけ旋回ヨーを発生させる。また、前後輪間のトルク配分において、前述のアッカーマンジオメトリーの影響で後輪車速が前輪車速より速くなったときに、前後のトルク配分を変更することでアンダーステアとならず旋回ヨーを発生させるというヨーレートのフィードバック制御されている。カップリング特性を熟知した制御が行なわれているのだ。
※関連記事:三菱エクリプス・クロス試乗記 伝家の宝刀S-AWCがライバルに差をつける
デリカD:5の4WD制御
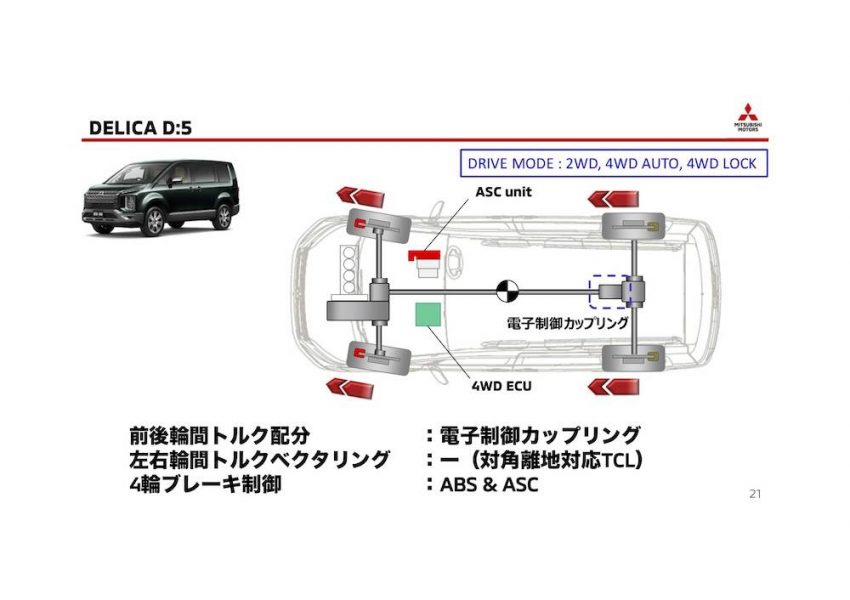
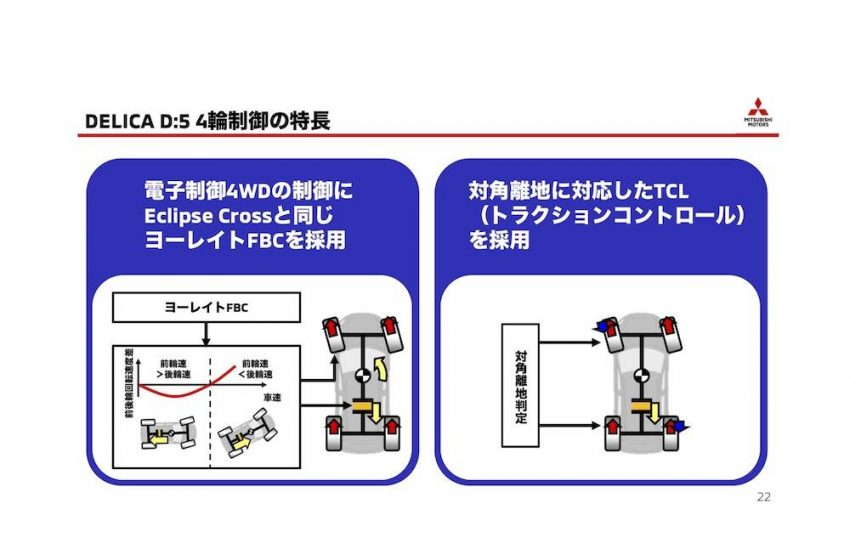
デリカD:5はこのS-AWCの範疇ではなくAWCに分類さているが、別な手法による4輪制御を行なっている。搭載制御技術として、前後輪間のトルク配分はカップリングでエクリプスクロスと同様。左右輪間のトルクベクタリングは上記の制御はなく対角での接地荷重をセンシングしてトラクションをコントロールするという手法だ。こうした制御で悪路走破力を高めている。そして4輪ブレーキ制御としてABSとASCアクティブスタビリティコントロールを装備している。
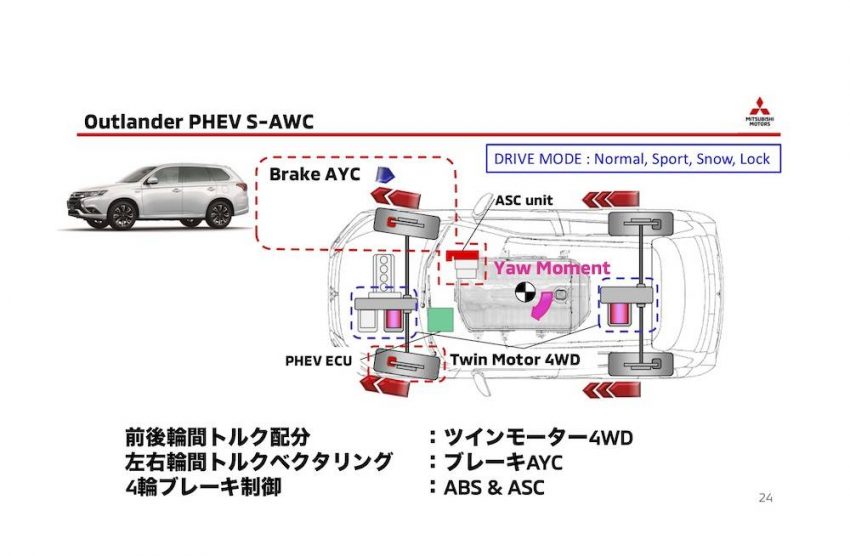
アウトランダーPHEV
アウトランダーPHEVは前後にモーターを持っており、前後輪間のトルクはそれぞれのモーターが駆動している。左右のトルクベクタリングはブレーキAYCを装備し、4輪ブレーキ制御はABSとASCで制御される。このクルマはモーター駆動であることと、前後独立していることなどから、制御領域を幅広く取ることができ、まだまだ、我々の知らない新しいコーナリングの世界を作り出す潜在能力の高いクルマでもある。実は公表できないプロトタイプも開発されており、未来が楽しみなクルマの筆頭でもある。
※関連記事:三菱アウトランダーPHEV試乗記 フルモデルチェンジに等しいひとクラス上に押し上げた改良
関連記事:三菱自動車の4WD基本概念は常時AWD【エクリプスクロス試乗記】
三菱 アウトランダーPHEV 関連情報
三菱 エクリプス クロス 関連情報
三菱 デリカD:5 関連情報
三菱 関連情報
三菱自動車 公式ホームページ













