ECLIPSE-CROSS NEW COMPACT SUV
三菱エクリプスクロス 極めた走りとクーペデザイン
三菱自から国内では4年ぶりの新型車となるエクリプスクロスが発売され、大きな注目を集めている。コンパクトSUVという競合他車が多い中、いかに選んでもらうかがこのセグメントのキーになる。では他車とは違う魅力は何かを考えてみると、4WD制御技術にあると思う。そこでエクリプスクロスの紹介も兼ねて考察してみた。<レポート:高橋明/Akira Takahashi>
三菱自のオールホイールコントロール(AWC)という考え方は、開発を取りまとめる澤瀬薫博士に因るところが大きい。澤瀬博士はランサーエボリューションで一世を風靡したAYCをはじめ、車両運動統合制御システムを研究開発している第一人者であり、現在はEV・パワートレイン技術開発本部 チーフテクノロジーエンジニアとして、三菱自の技術開発に携わっている。

基本概念を理解する上で動物に例えるとするならば、チーターは四足を駆使して、急加速、急減速、急旋回を行なっている。クルマも動物と同様、モノが動くと加速度が生じる。止まろうとすると減速度が生じる。そして曲がろうとすると、遠心力が働いて外側の足が重くなって内側が軽くなる。クルマが平面の上で動こうとすると、つねに4つのタイヤにかかる荷重が違い、その荷重が違う状態で運動をしようとすると、当然、荷重がたくさんかかっているところをしっかり支えてあげなければ、クルマでも動物でもうまく動くことができない。そのため、ドライバーの意図通り、操作どおりにクルマが動くようにしようと思ったら、4輪にかかっている負荷に合わせて、駆動力も4輪にかけるべきであり、ブレーキも4輪にバランスよくかけてあげるべき。それが、もともとのAWCの思想であると澤瀬博士は説明する。
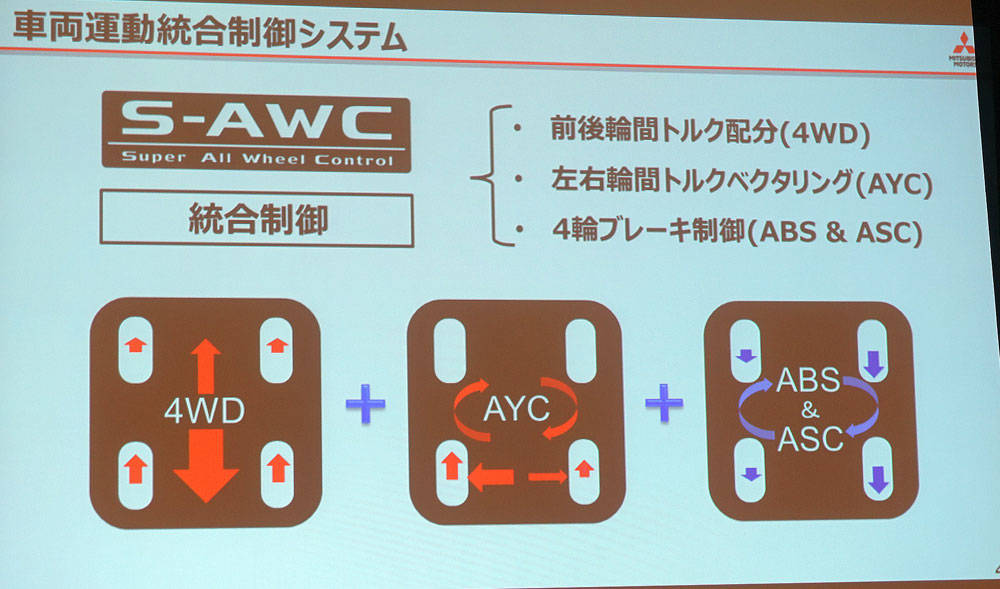
その澤瀬博士によると、三菱自が追求する車両運動統合制御システム「S-AWC」の定義は、前後輪間のトルク配分を制御できること、左右輪間のトルクベクタリングができ、旋回制御ができること、そして、ABSやASC(アクティブ・スタビリティ・コントロール)を組み合わせ、4輪のブレーキ制御を行なうこと。これらがS-AWCである。
現在の三菱自の4WD比率は42%程度ということで、この比率をもう少し上げていき、三菱自の特徴としていくことを目指していくということだ。現在、スバルやランドローバーは約98%が4WDのシェアで、40%前後の3位グループにはアウディなども含め数社が存在しているが、そこから抜け出す比率を目指すという狙いだ。
目指すパフォーマンスとして、トラクション性能とハンドリング性能を高めていくわけだが、その手法と考え方にも独自の理論がある。
一般的な4WD制御の考え方として、発進時などのトラクション、コーナリング時のハンドリング、高速走行などの安定性など、各条件での性能向上をめざしているが、それはその条件の時に制御するデバイスを動かすというやり方だという。つまり、滑りやすい路面での発進時はトラクションを制御するデバイスで発進させるということで、他のデバイスとの連携がなく、スイッチングで制御しているのだという。
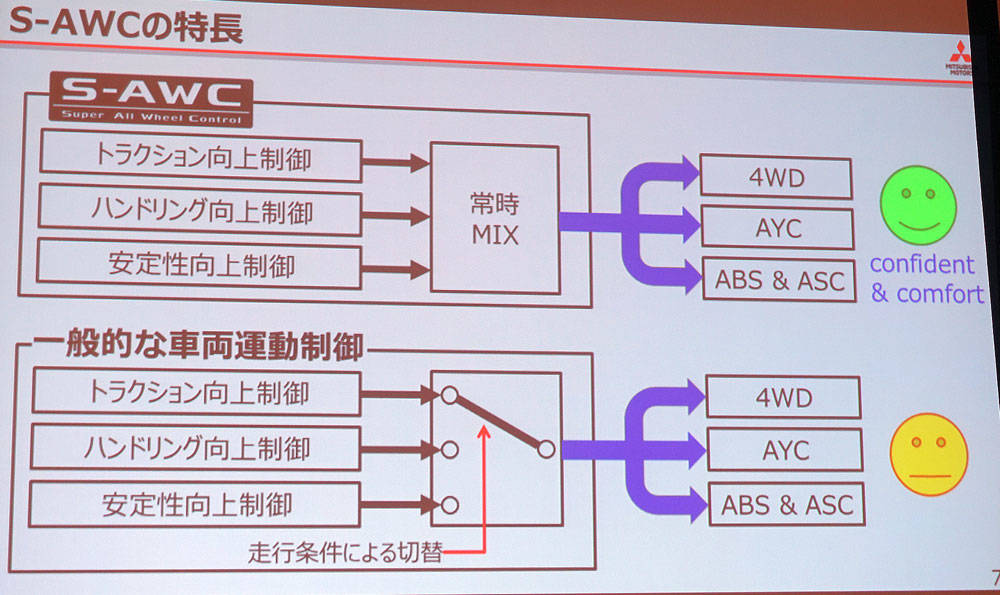
そうしたスイッチング制御だと、実際の走行状況ではマッチングしない場面がある。また運転の仕方によってもマッチしないケースも出てくるという。これはフィードフォワード制御中心であるからで、横滑りしそうなカーブを曲がりながらトラクションを得ていくような場面も現実には存在するからだ。澤瀬博士によれば、条件のしきい値で判定するという制御が一般的だと指摘している。
澤瀬博士の考えとしてはどんな人でも条件でも安心で快適な運転ができる、というのが三菱自の特徴だと説明する。
■常時4WD制御
具体的には、上記の各条件における性能向上は同様だが、スイッチングせず、常時デバイス間が情報を共有し、スタンバイ状態も含め、MIX制御することだ。
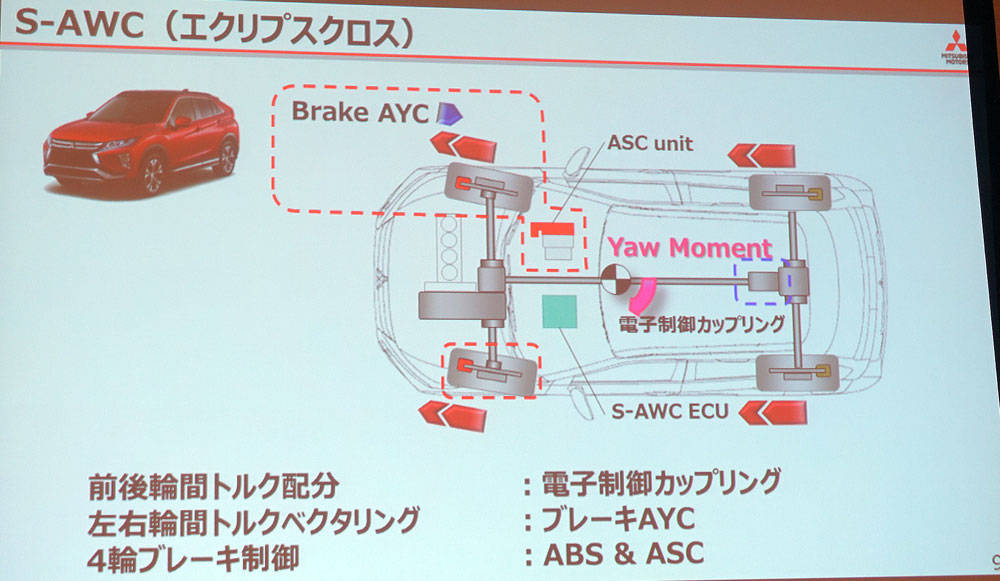
エクリプスクロスの制御では、使っているハードは他社と同様でJTEKT製ITCC(電子制御4WDカップリング)だが、デフォルトでは車輪速とアクセル開度で制御している。そのうえで、ヨーレートセンサー、操舵角センサー、加減速のGセンサーなどを追加してフィードフォワード制御し、フィードバックするという考え方で作られているのだ。
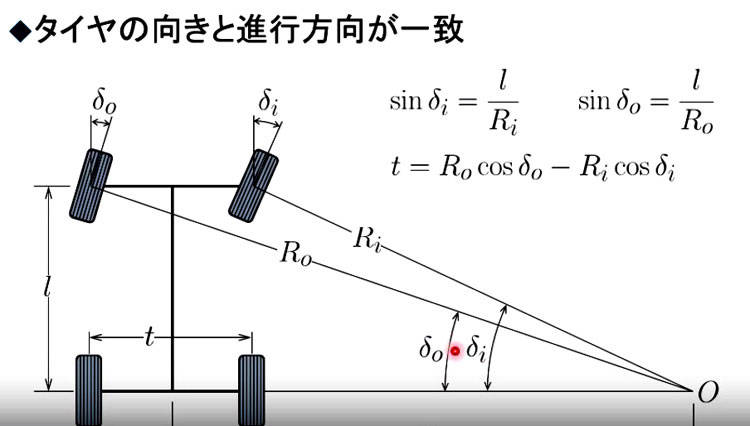
そしてここからが奥が深くなっていくのだが、シャシー設計では現代のクルマはアッカーマンジャントー・ジオメトリーで設計されている。これは何かというと、後輪の車軸の延長線上の旋回中心点に対して、スムーズに車体が旋回できるように前輪のステアリング・タイロッドを設計するということで、下図を見てもらうと0が旋回の中心点で、そこを中心に旋回できるように設計しているということだ。
さて、このアッカーマンの影響で、前後の車輪速が速度によって異なってくる。定常円で一定車速の旋回としたとき、低速時は前輪のほうが速い。が、ある速度域で前後の車輪速度が入れ替わるのだ。それは車両によって変わるのだが、だいたい30~50km/hで後輪の車輪速のほうが速くなってくる。
そして4WD制御方法では、前輪の車輪速のほうが速いときは、前輪から後輪に向かってトルク配分する。この時アンダーステアが強ければ、カップリングをつなぐことでより後輪にトルクを流して前輪のグリップを回復させることが可能だ。
逆に車速が高い領域では、常に後輪のほうが前輪より速い状態で旋回している。この時アンダーステアが強いからといってカップリングをつないでしまうと後輪から前輪にトルクが流れてしまい前輪のグリップがますます低下してしまう。アンダーを抑制しているつもりが逆にアンダーを増していることになる。この状況では後輪は引きずられてエンブレがかかったような状態で止めようとする力がかかっていることになる。
したがって、旋回時のヨーレートセンサーを組み合わせ、ヨーモーメントをどれくらい作用させたいか?を考え、アクセル開度や前後加速度等の情報も得て、加減速の度合いを判断し、どのデバイスでどの程度制御するのがベストなのかを判断するというのが三菱自の4WD制御の考え方なのだ。
したがって4WDの前後トルク配分で言うと、フロント100:リヤ0という瞬間がなく、常に前後にトルク配分された常時4WDというのが基本的な考え方ということができる。
■雪上試乗してみた
さて、三菱自の4WD制御の考え方=S-AWC(スーパーオールホイールコントロール)はどんな条件でも、どんな人でも安心安全なドライブができるように、ということを理解したうえで、北海道の千歳近郊のダートラ場の圧雪路で試乗してきた。

新型エクリプスクロスにはドライブモードとしてauto、snow、gravelの3つがある。グラベルとはラリー用語で、未舗装路のことだ。電子制御カップリングを使うエクリプスクロスでは、このグラベルモードの時がもっともクラッチの締結力が強く、ロックモードに近く、スタックの脱出などでも使えるモードだ。

クローズドコースの雪上試乗なので、さまざまな運転方法で乗ってみたがいずれも安定志向が強く、なかなか不安定な車両姿勢にはならない。急ハンドル、オーバースピードでもS-AWCが働き安定する。一時的にタイヤのグリップ限界を超えて滑り出したとしても、すぐに制御され速度が落ちグリップの回復が自然と行なわれるのだ。
こうした無謀な?運転をしたとしても安定した走りが提供され、常識的な運転操作であればまるで舗装路を走るかのように雪上を走行することができるのだ。

試しに車両安定装置のASCを解除してもみたが、滑り出すことは起こるものの、さらに滑ると4WDによる前後のトルク配分や、ブレーキを使ったAYCも働き、やはり姿勢制御が行われるのだ。
このようにアーバンスタイルを意識したクロスオーバーSUVのエクリプスクロスにも、本格的なSUVとしての機能、性能を搭載していることが分かる。また、こうした技術が悪路だけでなく高速道路や雨天などでも安全への威力を発揮することは言うまでもない。こうした安全で快適な走行を可能とするS-AWCは、三菱自にとってのセールスポイントとして注目したい性能だ。













