前回はZFが目指す最先端の技術を搭載したビジョンゼロカーを紹介し、その実際をレポートした。今回はそのビジョンゼロに搭載される自動運転について、具体的な技術や方向性を整理してみた。<レポート:高橋 明/Akira Takahashi>
ZFグローバル試乗会レポート vol.1 自動運転、EV化への未来像
ZFグローバル試乗会レポート vol.2 未知の体験が続々と
ZFグローバル試乗会レポート vol.4 データで動かすシャシーコントロールの世界

最初にZFが目指す自動運転(automated drive)のために、さまざまな企業との連携が必要であり、そのために株式の取得や提携といったものを実施している。
具体的には、半導体、ライダー開発のIBEO社の株式40%を取得、NVIDIAとの提携でZF Pro AIを立ち上げ、世界初の人工知能型電子制御ユニットの開発、超高周波レーダーのメーカーAstyx社の株式45%の取得、内装部品の大手Faureciaとのパートナーシップ、そして直近のHELLAとの戦略的パートナーシップなどにより、開発を進めている。

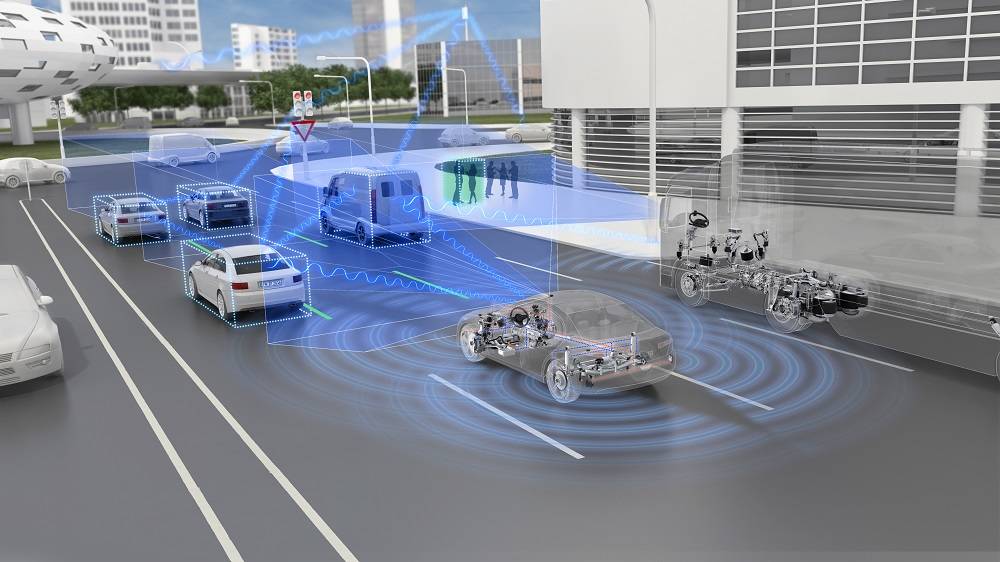
これらの技術の他にも車両環境を3D表示する高解像度レーダーの開発や、レーザーとの融合技術の開発を行なっている。従来の3眼カメラTri-CamやRadar AC2000とを組み合わせ、360度全周囲表示できるように開発が進められている。

そしてZFではレベル2及びレベル3の自動運転機能開発に注力しており、高速道路運転支援システムに加え、自動出口走行支援の新機能を追加している。
今回のイベントで体験できたのは、これらの技術をベースに開発されたこの自動出口走行支援を体験できた。システムはアウトバーン(高速道路)を降りる際にドライバーが出口車線を選択すると、車線変更が自動で行なわれるものだ。GPSを用いての地図との連動が可能であり、タッチスクリーン上のボタン操作で出口を選択すれば、システムが自動操縦を行なうというものだ。

高速道路上での車線変更はすでに開発済みであり、ウインカーを出せば自動で車線変更を行ない、出口車線を選択すると自動で移動する。そして出口ランプのカーブを検知し、車速が自動で減速されコーナーのRも自動で操舵される。これは入り口でも同じ操舵が可能で、入り口から自動で操舵させ、合流車線の直進状態になった時点でドライバーに操舵が戻されることを体験した。
ZFではこの機能の位置づけとしてautomated driving Highway driving supportとしている。そしてこれらの先には無事故を目指すビジョンゼロがあるわけだ。

残る課題のひとつとしてセンサーやセンサーフュージョン、アクチュエータが事故の危険を検知してから状況に合わせて作動するための時間短縮だ。
ZFでは事故の統計データから、前方、および側方衝突に関して、広範囲な想定シナリオを導き出し、解析した結果、評価対象とした事故例の60%以上において、事故回避が不可能となってから、実際に事故が起きるまでの時間が1/500msecであることが分かったという。
また、対向車が高速で正面衝突したような事故例では、この時間が1/300msec秒未満であることもわかったと説明している。
このため、事故回避、同乗者への被害軽減をするには、その時間内に回避行動を行なう必要があることが明白になった。そのためにZFでは、高速パルス型センサーだけでなく、多段階で包括的なセンサーシステムを開発しているという。また、車両には、乗員の安全を最大限に確保するために、車両のルーフ部やシートに装着する保護システムやセンターエアバッグなどの開発も同時に行なっている。
そして、もう一つ重要な課題としてドライバーとシステムの運転モードの切り替えだと指摘する。車内でドライバーの自由度が高まるほど、運転への介入が必要となった時に備え、アクティブにドライバーの状態をモニターすることが必要だという。ドライバーが状況を把握し、運転に戻れる状態にあり、そのための情報が正確である場合にのみ、自動運転が解除される仕組みが必要だとゴウレスキ博士は説明した。
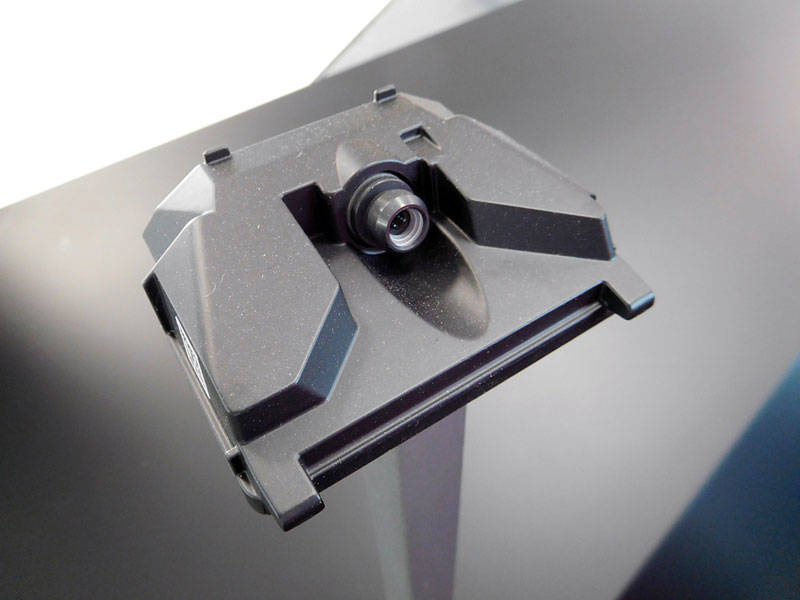
つまり、自動運転が徐々に近づきつつあるが、その前にもまだ乗員を守るための装備も必要であり、そのためのソリューション開発も同時に進行させなければならないことを教示しているわけだ。具体的にタカハシが目にしたのが、前回お伝えしたドライバーディストラクションカメラだ。3Dでドライバーの目と頭の位置を監視し、ドライバーがどのような状態にあるのかを監視している装置だ。

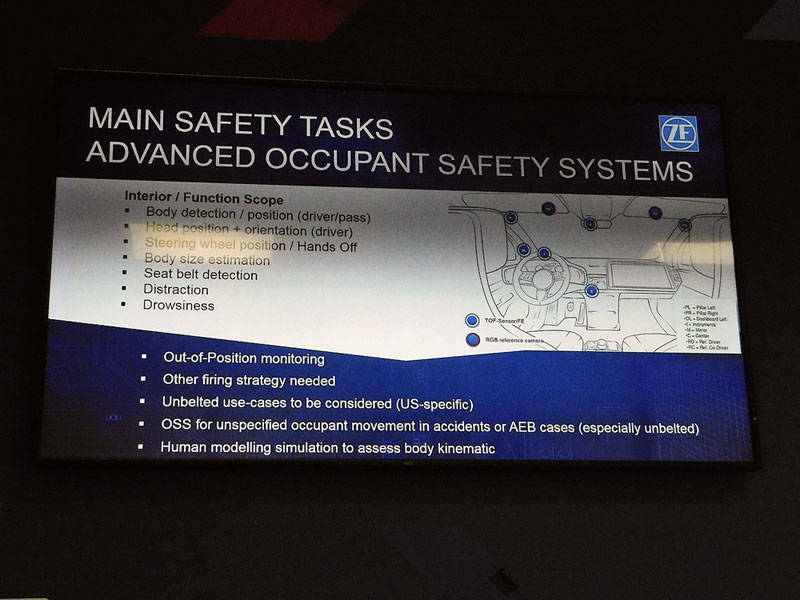
写真は2025年までに進化を求められるソリューションの表で、ベースとなっているのは欧州、米国、中国の規定による安全対策であり、対象は乗員保護、チャイルドシート、歩行者保護、そして安全アシストシステムに分類されている。
■まとめ
今回のプレゼンテーションでは、現在の運転支援システムのよりレベルの上がったものとして、高速道路の出口を自動操舵する技術を体験し、そしてその先に必要な技術と、装備がなんであるか?ということが整理できた。さらにレベル3からレベル4に至る過程においても、継続的に事故は起きていて、それらを防ぐためのソリューションも必要とされていることも理解できた。
さて、次回は、ZFが得意とするシャシーテクノロジーについてレポートしたい。
ZFグローバル試乗会レポート vol.1 自動運転、EV化への未来像
ZFグローバル試乗会レポート vol.2 未知の体験が続々と
ZFグローバル試乗会レポート vol.4 データで動かすシャシーコントロールの世界













