
ZF TRW社は2015年10月28日~11月8日まで開催された第44回東京モーターショー2015に、近未来のメガトレンドを提案し、同社の技術を結集したコンセプトカー「アドバンスト・アーバン・ビークル(AUV)」を出展した。
■「Eモビリティ事業部」、R&Dセンターをドイツ、横浜に新設
このコンセプトカーは、大都市、市街地の多い日本において、都市型の交通が抱える課題に最適なソリューションとされる。AUVは、ZFグループがTRW社を買収し一層広範囲な技術と製品ラインアップが可能になり、より優れた利便性やメリットを提供できる体制となったことを示している。さらに同社は2016年初頭から新たに「Eモビリティ事業部」をドイツ、シュバインフルトの拠点に集約してスタートする。
さらにZFグループは、日本における事業拡大の一環として横浜にR&Dセンターを設立し、 Eモビリティを中心とした研究開発業務を開始する。手始めに今後2年間で新たに70名のエンジニアを採用し、さらに継続して事業を拡大する計画としている。
東京モーターショーで会見した。ZFのCEOのシュテファン・ゾンマー博士は、「このコンセプトカーでお分かりのように、ZFの技術開発は現在、効率、安全、自動運転という業界のメガトレンドに焦点を置いています。このAUVはまた、ZF TRWの製品ラインナップが高度に、かつ相乗効果を生む形で相互に補完していることを示しています」と語っている。
■アドバンスド アーバン ビークル(AUV)
アドバンスト・アーバン・ビークルは、コンパクトカーによる都市型のパーソナルな移動手段の電気駆動ソリューションと位置付けられる。このコンセプトカーには、リヤアクスルは電動リヤ・アクスルドライブ/eTB(エレクトリック・ツイストビーム)としたリヤ駆動で、フロントは最大切れ角75度という革新的なフロント・アクスルを備える。
と

電気自動車の「アドバンスト アーバン ビークル」は標準的なサブコンパクトカーをベースにして、すべてZF社が自社製造している。駆動電源は、3基のモジュールに格納されたメインバッテリー(蓄電容量16kWh、定格電圧355V)で、それらはフロントアクスルおよびリヤアクスル付近に搭載される。


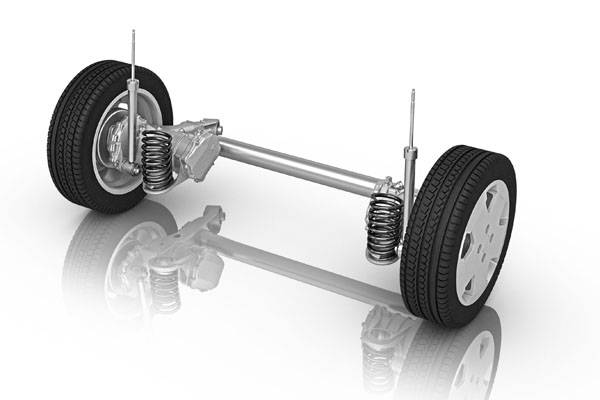
半独立式リヤ・サスペンションのエレクトリック・ツイストビーム(eTB)は、出力40kWのコンパクトな駆動部が左右のホイールにそれぞれ取り付けられ、駆動力を直接ホイールに伝達する。AUVは基本的に都市部の交通に特化されたもので、最大トルク1400Nm、モーターの最高回転数は2万1000rpmで、最高速度は150km/hとされている。
■スマート・パーキングアシスト
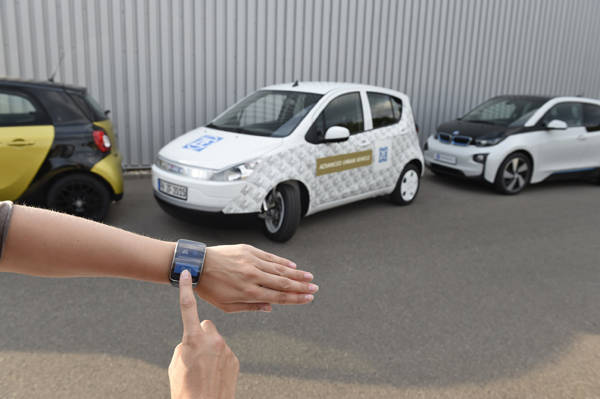
驚異的に大きなステアリング切れ角とリヤ・アクスルのモーターによるトルクベクタリングにより、回転半径は3.25m未満となり、 2車線道路でのUターンも容易に行なうことができる。AUVに搭載されている2種類の運転支援機能のひとつが、限られた駐車スペースにも適切にクルマを誘導するスマート・パーキングアシストだ。このシステムでは、スマートフォンやスマートウォッチといったモバイル機器をリモコンとして使用することで車外からのクルマの駐車操作が可能だ。
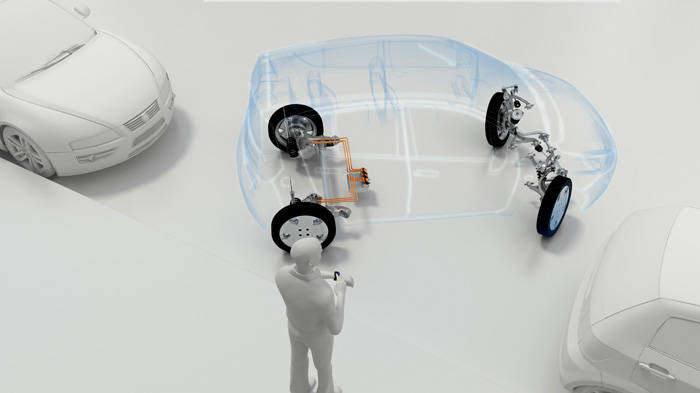
この新しいフロントアクスル構造は、スマート・パーキングアシストと組み合わされたときに本領を発揮するのだ。このシステムは、適切な駐車スペースの認識を支援するだけでなく、並列、縦列のいずれのスペースでも対応する。低速度で走行しながら自動で周辺にある適当なスペースを探し、自動で駐車プロセスを起動。完全に自動で駐車することができる。
駐車支援のために前方、後方、側面に搭載された12個の超音波センサーと2個の赤外線センサーで情報を取得し、適切な駐車スペースを見つけることができる。そしてコンピューターが情報を処理し、電気駆動や電動パワーステアリングに必要な操舵角といった、駐車機能に関連するすべての制御を行なう。ドライバーは情報処理中に運転席にある画面から指示を与えたり、車外に出た後であれば、スマートウォッチなどのモバイル装置を利用して駐車機能を起動することができる。次にクラウド型運転支援機能を見てみよう。
■クラウド接続型運転支援機能の「PreVision Cloud Assist(プレビジョン・クラウド・アシスト)」
もうひとつの機能がクラウド接続型運転支援機能の「PreVision Cloud Assist(プレビジョン・クラウド・アシスト)」だ。この進行方向の先読み機能により、減速が必要な時にはトルクを自動的に適切なタイミングで下げることができ、メカニカルなブレーキを使わずに減速できる。

つまりこの先読み機能はGPSに頼るシステムとは異なり、地形データと許容最大速度情報のみではなく、すべての走行について、車両位置、その時点の走行速度、経緯度に関するデータをクラウドに保存する。ドライバーが同じルートを再度走行すると、システムは経験的データと実際の車両データ、デジタル地図情報に基づき、カーブ進入に最適な速度を計算。続いて支援機能がカーブ進入前に、機械的にブレーキ操作を行なわずに曲がれる速度までトルクを落とす。これらの一連の動作は、バッテリーの節約やブレーキシステムの保護になるだけでなく、見通しの悪いカーブでの安全性を大きく向上させることができる。

またこのシステムが作動中であってもアクセル操作は可能だ。スピード調整をしたい場合は、キックダウンによって随時アシスト機能を解除することができ、ペダル操作優先の運転が可能となる。ZFグループ研究開発部門の責任者、ヘラルド・ナウンハイマー博士は「PreVisionクラウドアシスト」は、高い付加価値を有する学習型システムです。運転の都度、道路状況、道幅、カーブの視認性といった重要データが蓄積されます。これらの情報はGPS地図情報だけに頼るアプリケーションではアクセスできません。PreVisionクラウドアシストではこれらのデータを経験として把握することで、正確にドライバーをアシストします」と語っている。
なお走行モードはボタン操作で切り替えができるようになっている。PreVisionクラウドアシストには2つの走行モードが用意され、ドライバーのスタイルに合わせたモード選択ができる。エコモードでは燃費が最も良くなる走行スタイルが選択され、カーブ接近時に早めに減速が開始される。また効率を落とさずにダイナミックな走りを望む場合は、スポーツモードを選択する。そして減速タイミングを遅らせ機械式ブレーキを使用せず、回生ブレーキで最適なカーブ進入速度が得られる。


AUVに搭載される多機能ステアリングホイールは、リムの上部に有機ELディスプレイが取り付けられ、そこに表示される情報が直接ドライバーの視野に入るのが特徴だ。ディスプレイには、PreVision が制御するカーブ進入時の減速トルクや通過後の加速トルクといった情報が表示、つまりドライバーは常時PreVisionクラウド・アシストの状態を把握することができる。
また、ステアリングを経由してドライバーの存在を常時検出。ドライバーがハンドルを握っているかどうか、ステアリングホイール全面に施された静電容量式のタッチセンサーが感知し、感知情報はステアリングホイール内に組み込まれた電子制御ユニットでデジタル信号化され、LIN(ローカル・インターコネクト・ネットワーク)経由でシステムに送信される。この信号を元に、システムが状況に応じてドライバーへの警告発信や使用可能な支援システムの作動などを行なうことができる。
このハンズオン検出により、クルマが混雑する時間帯に面倒な発進・停止の繰り返しを強いられる市街地走行などにおいて、ドライバーの負担を減らす支援機能や自動運転機能に必要な情報が確保される。そして前方車両との安全な車間距離の維持や、状況に応じた精度の高いブレーキ開始動作などが可能となる。例えドライバーがハンドルから手を放していたとしても、システムは高度なアクティブ・セーフティを確保することができるのだ。
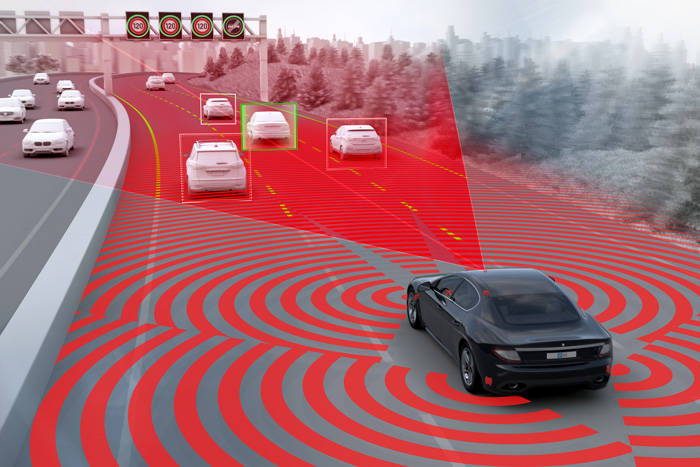
またAUVは予測型環境センサーを装備している。このセンサーは環境データの記録と保存も可能だ。ステアリングシステム、ブレーキ、アクティブ・ダイナミックコントロール(ESP)とカメラ、レーダーシステムからの情報を統合させることで、運動性能の限界を拡げ、クルマの安全性を更に向上させることができる。
ステアリングシステムとブレーキ、そしてアクティブ・シャシーシステム、さらにカメラ付レーダーシステムの組み合わせにより、ステアリングとブレーキを的確に介入させることで走行を安定させ、車体の横滑りを防止することができるのだ。
さらに、ステアリングシステムとアクティブ制御のCDC(連続可変減衰力コントロールシステム)、そしてカメラ映像分析システムを連動させることによって安定性を高められ、そのカメラからの情報を基に、凸凹路面走行時のダンパーの減衰力とステアリングを事前に調整(「予測型ダンピング」)することが可能なのだ。













