デンソーテンは2023年2月9日、ドライブレコーダーの車載カメラ映像から「信号無視」や「車線逸脱」といった交通事故の要因となる危険シーンを、走行中にリアルタイムで検出する技術を開発したと発表した。
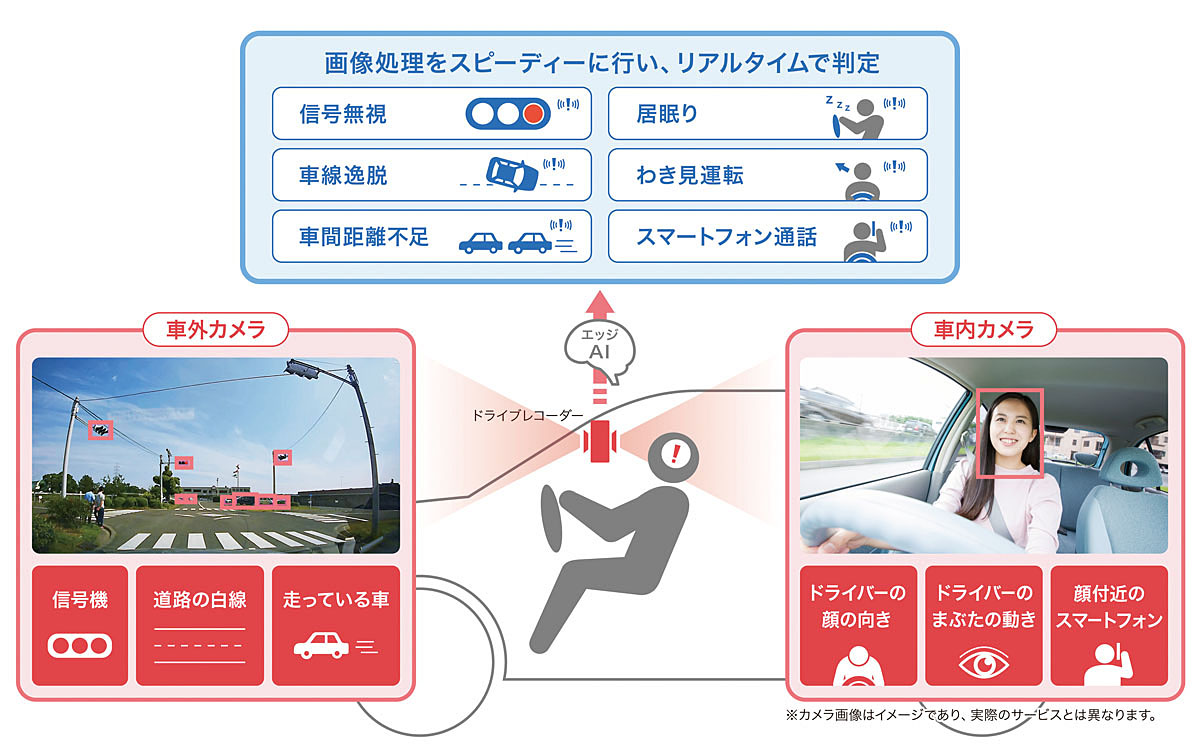
高性能・高速エッジAIを車載器に組み込み、デンソーテン独自の画像認識アルゴリズムを活用することで、画像処理をスピーディーに行ない危険シーンを抽出する。例えば、運転中に赤信号無視や青信号での発進遅れ、自車位置と車線との距離からふらつきや車線逸脱を検出した際に、車載器からドライバーへリアルタイムに注意を促すことができる。
法人向けドライブレコーダーを用いた「安全運転管理テレマティクスサービス」では、車載器が衝撃を検知した際にカメラ映像をクラウドに自動送信するシステムになっている。ここに今回の技術が加わることで、衝撃の発生しない危険シーンでも検知することが可能となり、さらにリアルタイムにドライバーへ通知を行なうことで、より一層ドライバーの安全意識を高め交通事故を未然に防ぐことができることになる。
デンソーテンが開発した高性能・高速エッジAIと車両周辺監視システム「マルチアングルビジョン」で培った画像処理技術を応用し、様々な検知機能を実現し、車載環境に適合させ車載器に実装可能な技術として開発。今後、この技術を搭載した法人向けドライブレコーダーとして、2023年夏頃の実用化に向け準備を進めている。
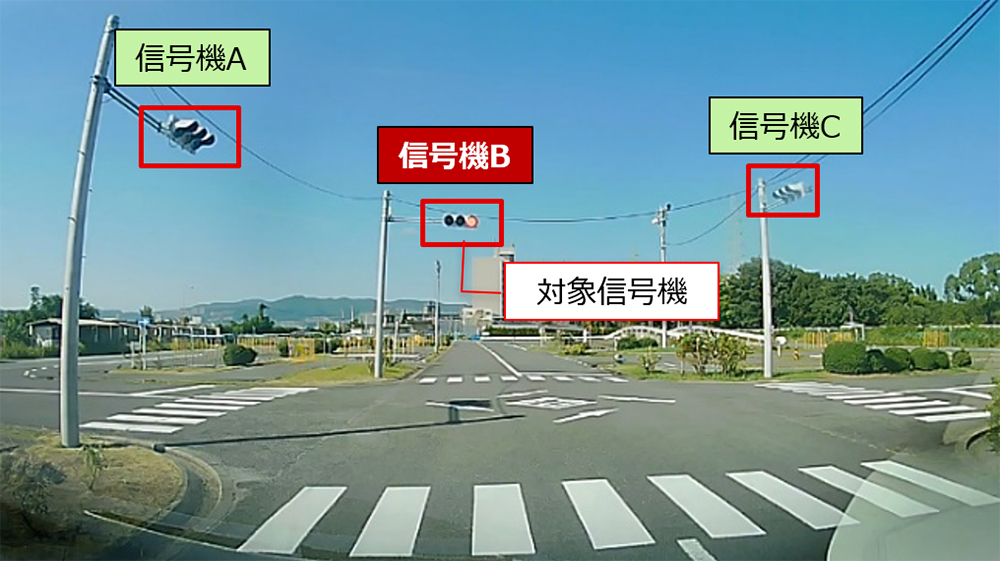
危険シーンの検出は高性能・高速エッジAIと独自の画像処理技術による。運転中の車両から遠く離れた小さな信号機を検知することが可能で、交差点に直進で差しかかった場合、独自のアルゴリズムで運転中の車両から信号機までの距離と方向を算出することで、前方にある信号機「B」を従うべき信号機(対象信号機)、左右にある信号機「A」・「C」は対象外と判定する(特許出願済)。その対象信号機を赤信号で通過した場合に信号無視と判定するようになっている。
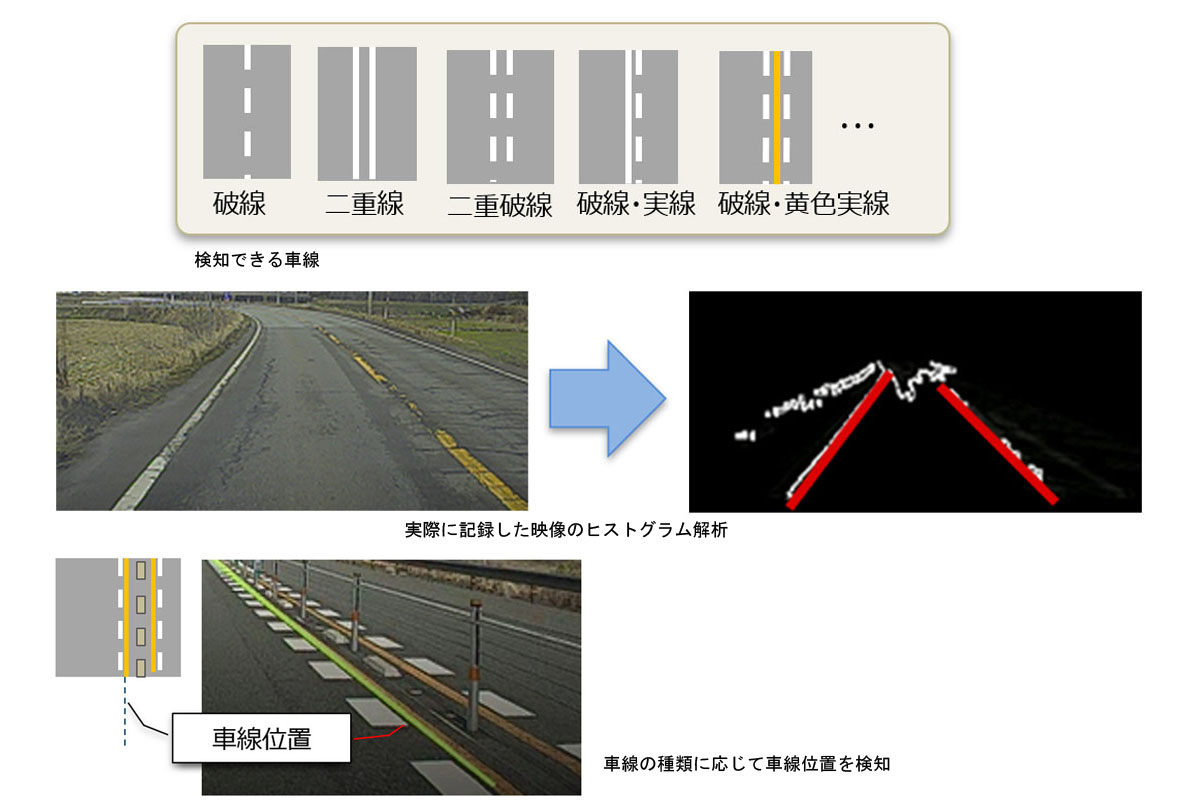
次に車線の検出は、画像の濃淡から車線を検知するヒストグラム解析を行ない、車線とそれ以外(路面や歩道)を分離することで、薄れた車線も高い精度で検知可能(特許出願済)。さらに破線や二重線などの車線を検知し、車線位置(はみ出してはいけない線)を定め、自車両から車線までの距離を正確に検知することで、ふらつきや車線逸脱をより高い精度で判定する。
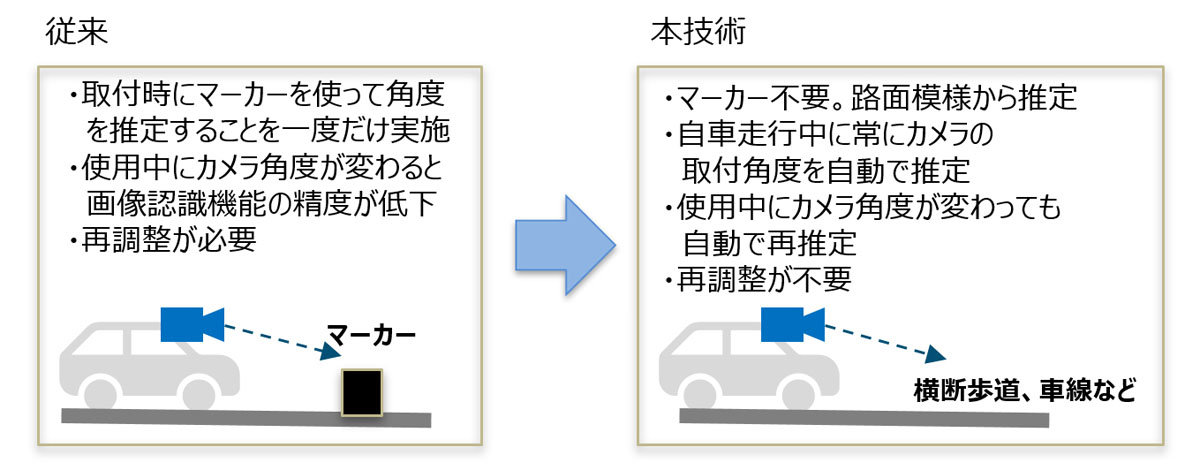
また従来はカメラ取付時にマーカーを使用してカメラの角度を手動で設定していたが、オートキャリブレーション機能を加えることで、走行中にカメラの取付角度を自動で推定し補正する(特許出願済)。カメラの角度が変わっても、自動で再推定されるため検知対象物までの距離を正しく測ることができ、信号検知や車線検知など危険シーンの検出精度が飛躍的に向上している。














