
2014年10月2日、グローバル・オートモーティブ・サプライヤーのコンティネンタル社は、高度自動運転技術を装備した実験車両で日本でのナンバープレートを取得し、自動運転技術の公道実験を開始した。もちろんこのナンバー取得により、ステアリングホイールから手を離すなどの許可も得ており、今後は日本各地の道路で実証実験、データ取得が行なわれることになる。
■日本での自動運転の公道試験開始
コンティネンタル社は、すでに2012年12月にアメリカのネバダ州で自動運転システムを搭載した実験車のナンバーを取得して公道実験を行なっており、ヨーロッパでも2013年からBMWと共同で自動運転を前提とした実験車によりアウトバーンでの実験を実施している。なお、コンティネンタル社の「自動運転」は、Google社の推進している自律型の完全自動運転ではなく、高度運転支援システムという位置付けである。
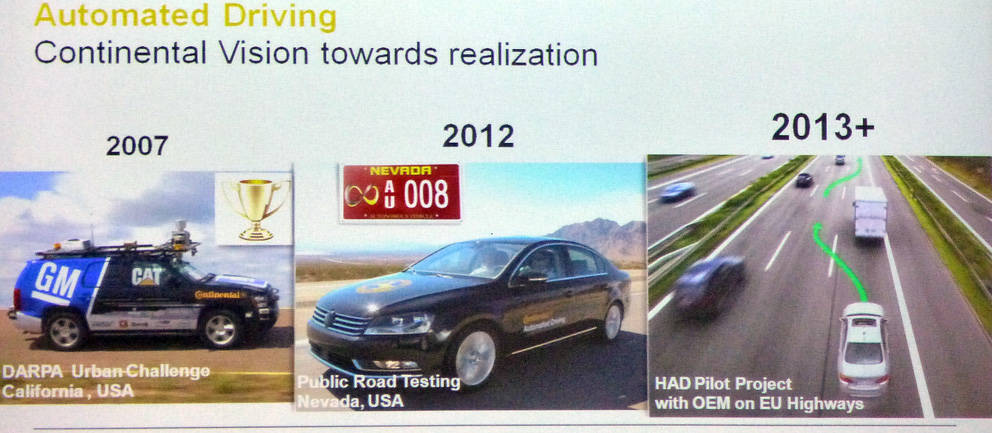
コンティネンタル社の自動運転技術におけるマイルストーンは、2007年にアメリカで行なわれたDARPAアーバンチャレンジが本格的な技術開発で、カーネギーメロン大学と共同で自律型自動運転車を作り、市街地コースでの自動運転レースで優勝を果たしている。この時の大学の研究チームの多くは、実は現在、Googleカーの開発に携わっているのだ。しかし、コンティネンタル社は、そうした自律型の完全自動運転を目指すのではなく、現在のドライバー支援システムを拡張、進化させるすることで高度運転支援システムを目指す方向にある。


日本で実証実験を行なうテストカーは、アメリカで走行していたVWパサートで、その1台を日本に持ち込み、最新の自動運転システムのソフトウエアにアップデートしたものだ。興味深いことにこのパサートには近距離レーダーが4個(フロントバンパー左右/リヤバンパー左右に各1個)、長距離レーダー(フロントグリル中央)、そしてステレオカメラという、現在すでに市場に投入されているセンサーのみが搭載されている。自動運転車で多く用いられているレーザースキャナーは搭載されていないのだ。
もちろん、自動加速や自動ブレーキ、電動パワーステアリングの自動操舵など自動運転のために統合制御を行なう専用制御ユニット(コンチネンタル・モーションドメイン・コントローラー)を備えている。このクルマが備える機能は、物体の検知、歩行者の検知、工事区間走行の自動アシスト、渋滞走行アシスト、道路標識の認識などだ。現在のアクティブ・クルーズコントロールの機能を拡張させ、高度ドライバー支援システムとしていることがわかる。
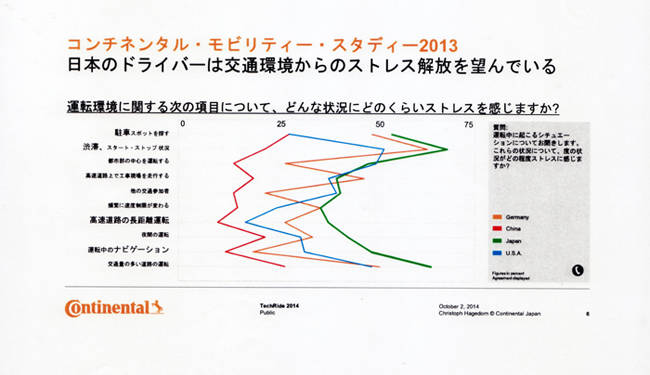

アメリカ、ヨーロッパに続いて日本で自動運転の実証実験をスタートさせた背景には、コンティネンタル社が各国のドライバーを調査した結果、他国に比べ日本では渋滞時、高速道路の長距離運転で圧倒的に大きなストレスを受けていることが判明したからだ。
他国では、高速道路の長距離運転でのストレスははるかに低い。従って、日本は他国より自動運転技術が受け入れられやすく、多くのドライバーが望んでいる背景があると、コンティネンタル・ジャパンのクリストフ・ハゲドーンCEOは語る。また「この実験車両を日本で所有するということは、コンティネンタルが自動運転技術の開発で先導的な役割を果たす日本の自動車メーカーの動向にいかに応えられるかを真剣にとらえていることの象徴です」と述べている。
日本での実証実験は、まず東名高速道路で開始され、その後は市街地や北海道での実証実験を行なう予定だという。実証実験では自動運転の作動の確認、現時点の世界でのデータの収集がメインとなり、収集されたデータをデータベース化することで、将来的にはシミュレーションによる開発も可能になるという。
コンティネンタルの考える今後の自動運転技術には、車両同士の通信、クルマと社会インフラ、インターネット常時接続が不可欠だと、インテリア部門の開発を担当する円満字大輔氏は言う。もちろんそのためには、クルマの自動運転に関連するテクノロジーの進化だけではなく、ITのバックエンドとなるクラウド、クラウドが備えるビッグデータによる多様なサービスの拡充が求められるわけだ。日本流にいえばITSの活用である。
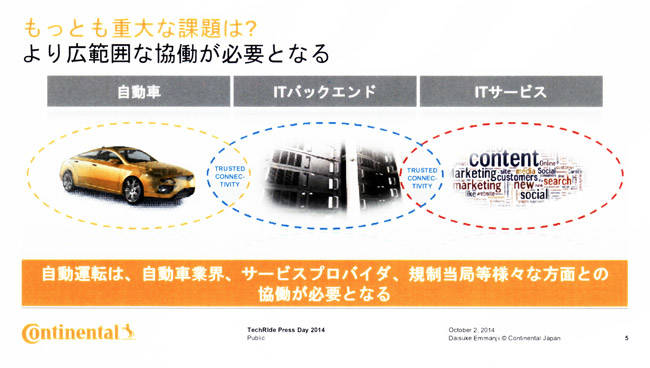

このような時代では、コンティネンタルは車内の包括的ヒューマンマシン・インターフェイス(HMI)、クルマと社会との高品質・大量のインターネットサービスに注目している。
特にインテリア部門では、大量に車内に流入する情報を最適にドライバーに表示するヒューマン・マシンのインターフェイスは必須で、拡張現実タイプのヘッドアップディスプレイ(AR-HUD)、状況に応じて最適に傾向を表示する多機能ディスプレイ、携帯端末との連携、ドライバーの好みに合わせることができる表示パネルなどが開発されているという。


将来的な自動運転のキーとなるのが、より広範囲からの交通・天候情報、詳細なデジタルマップなどの情報の取得で、コンティネンタルではこれを「e Horizon」と名付けている。
こうした多様な情報をクルマが取得することで、最適なエンジン出力やトランスミッション・ギヤの選択、道路・ルートの選択を先読みして行なうことで、燃費を改善し、ストレスのない快適なドライブが実現するというわけだ。
■自動運転車を初体験
メディア向けの自動運転のデモンストレーションは、コンティネンタル社の千葉県・旭テストセンターで行なわれた。自動運転のテストカー、パサートは外見上はいたってノーマルで、装備しているレーダーやステレオカメラもすでになじみのある物だ。ただ、キャビン内ではセンターコンソール上部に専用モニターが設置され、カメラは撮影している画像と、コンチネンタル・モーションドメイン・コントローラーが制御している様子がアニメーションで表示されている点がテストカーらしい。

このテストカーは高速道路でも市街地でも一定の自動運転が可能で、ドライバーはモニター画面と周囲の交通状況を監視している役目だ。制御は、各センサーの視界に入る物体や車線を追尾し、センサーから得た障害物など物体の情報は、処理されると制御ユニットに送られ、アクセルやブレーキ、ステアリングなどの操作が指令される。
渋滞走行支援機能は、最新の緊急自動ブレーキ機能を備えて追突や歩行者との事故を回避できる。さらに低速で前方車両に追従するので、ドライバーはステアリング操作の必要がない。
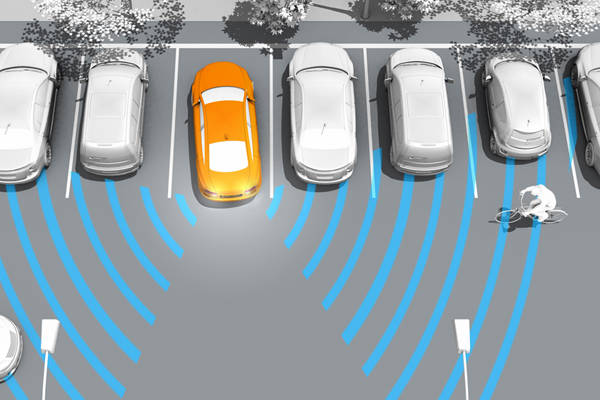
巡航状態で前走車がいない場合は、テストカーは道路標識を認識し、それに従い車速を調整し、車線内に維持して走行する。駐車車両など進路前方に障害物を検知した時には、スムーズに車線変更などの衝突回避操作が自動操舵で行なわれる。また工事区域などを通行する場合は、パイロンなどで区切られたレーンにレーンチェンジし、自車を誘導し走行する。



今回のテスト時には、路肩に歩行者がいるのをセンサーが検知するとテストカーは、歩行者をやや避けるように自動操舵され、車速もダウンされることが確認できた。現状では歩行者や自転車、前走車、路肩駐車車両、ガードレール、道路工事用のパイロン、速度標識などがカメラとレーダーで検出でき、前走車には自動追従し、駐車車両、ガードレール、歩行者などは障害物として認知され、その障害物の外側にバーチャル・ウォール(仮想障壁)を描き、そのバーチャル・ウォールに沿って自動操舵されるという制御ロジックだ。
このため、現状でも高速道道路や自動車専用道ではドライバーが介入することなく自動運転ができるはずで、市街地走行でもほとんどの場面でドライバーの操作なしで走ることができるようだ。
なお、今回のテストセンターでは、その他の最新技術搭載車の試乗、体験も行なわれた。
・歩行者検知緊急自動ブレーキ:第2世代のスモールカー向け緊急自動ブレーキシステム。従来のレーザーレーダーに単眼カメラを組み合わせて一体ユニットとしたもの。カメラで歩行者を検出し、レーザーレーダーで距離、相対速度を把握し、飛び出した歩行者などに対応できるシステム。

・交差交通警報ブレーキ:短距離レーダーにより、前進または後退時に横方向から来る車両に対する警報、自動ブレーキシステム。実際にはクルマだけではなく、横方向から接近する歩行者にも警報を発していた。
・ユーロNCAP対応ESC:ヨーロッパの自動車安全評価試験では、新たに緊急自動ブレーキ作動時のブレーキ油圧アップの速さが求められ、それに対応して従来の緊急自動ブレーキより短時間で最大のブレーキ力が発生できる。

・メルセデス・ベンツSクラス用のシートコンフォートシステム:横Gが検知されるとシートのサイド部がエア圧で変形し、ドライバーのサイドサポート性を向上させる。横Gの変化に対して敏感にエア圧が追従できることが体験できた。

・メルセデス・ベンツ Cクラスのタッチパッド:車両情報、ナビ、インフォテイメントのコントロールを行なうマウス形状のタッチパッド。パッド上面をスマホ画面のように指先で操作することで各種のコントロールができる。従来の大型ダイヤルによるコントロールと併用できるようになっている。スマホ世代の要求を採り入れた製品だ。

・その他の展示
















