雑誌に載らない話vol205
2017年10月10日、国交省は「自動車の自動操舵機能のうち、ハンドルを握った状態での車線維持支援機能、補正操舵機能、自動駐車機能に関する国際基準が、国連欧州経済委員会自動車基準調和世界フォーラム(WP29)において策定されたことを踏まえ、我が国においてもこの基準を導入します」と告示した。

■進行する国際調和
この告示だけでは、何を意味するのか分かりにくいが、まずはその背景を調べてみよう。
自動車に関する国交省での扱いは、保安基準等、自動車の基本的な要素は日本独自のものではなく、国際基準に合わせようという動きが継続している。
燃費・排ガスのテスト法=カタログ表示をJC08モードと合わせ、新しい国際基準であるWLTCモードにするというのもこの流れの中で決定している。
* WLTCモード参考ページ
また、保安基準の改定により、従来は認められなかったデイタイム・ランニングライトも許されることになり、ヨーロッパからの輸入車を筆頭に次々と導入されている。また、日本では法的に記載されていなかった、排ガス規制をくぐり抜けるための違法プログラムも明文化され、禁止される・・・などの表記となり、こうした動きはすべて国際基準に合わせた施策なのである。
国交省自動車局は、自動車の安全基準等について国際的な整合を図りつつ、安全性を確保するため、順次、拡充・強化を進めているというわけだ。
今回、自動車の自動操舵機能のうち、ハンドルを握った状態での車線維持支援機能、補正操舵機能、自動駐車機能に関する国際基準が、国連欧州経済委員会・自動車基準調和世界フォーラム(WP29)において策定されたことに従い、日本でもこの基準を導入することになったわけである。
じつは、日本では政府が主導する国家プロジェクト「戦略的イノベーション創造プログラム」の対象項目に自動運転が含まれており、政府、国交省、警察庁などもこの政策に従い、現在のレベル2の運転支援システムのクルマで、車線維持支援機能が作動し操舵アシストが稼働している状態では、ステアリングホイールから手を放した状態が続くことも認められ、当然ながら2020年の東京オリンピックで実現する、レベル3の自動運転でもステアリングホイールの手放し運転が認められることになっていた。

そのため、テスラ モデルSで導入されたレベル2の初期の車線維持機能は20分間以上、ステアリングホイールから手を放して運転できることも可能だったわけだ。その一方で、輸入車や国産車も、車線維持機能や同一車線自動運転などは、いずれもメーカー側が自主的に、長時間のステアリングホイール手放し運転を防ぐ対策を採り入れ、手放しが10秒から20秒続くと警告が表示され、30秒程度手放しが継続すると車線維持機能が自動的にキャンセルする設定になっている。
つまり、日本は政府、行政側は自動運転化にイケイケだったが、自動車メーカー側は慎重という通常とは逆の傾向になっていたわけだ。
■国際基準とは
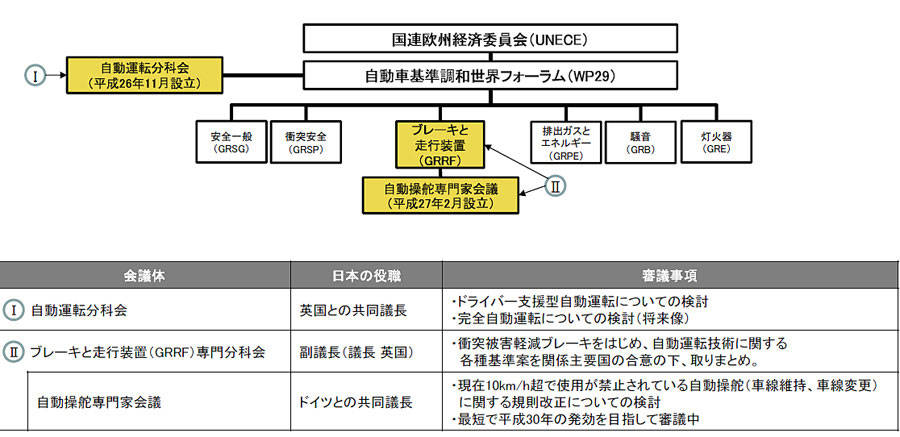
自動車の保安基準などを国際的に統一する動きは以前からあったが、その中心となるのが国連欧州経済委員会(UN-ECE)の政府間会合(WP29)で、特に最近では自動車の安全・環境基準に関する国際調和活動が行なわれている。
2014年には、自動運転について検討する「自動運転分科会」を立ち上げることが合意されている。この分科会では日本とイギリスが共同議長に就任し、自動運転に関する国際的な議論を主導。ここではドライバー支援型自動運転、完全自動運転についての検討が行なわれた。
さらにまた、2015年2月に開催された自動車のブレーキシステム関連会議で、「自動操舵専門家会議」を立ち上げることが合意された。この会議は日本とドイツが共同議長に就任し、10km/h超での使用が禁止されている自動操舵に関する規則改正を主導した。ここでは現自動操舵(車線維持、車線変更)に関する規則改正についての検討が行なわれていた。
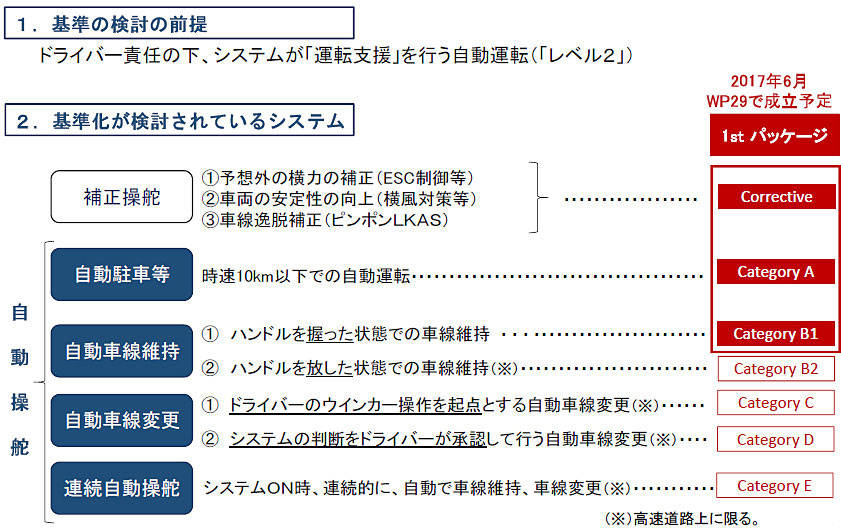
特に注目されるのが、ドライバーの責任でシステムが「運転支援」を行なう「レベル2」に関する国際基準の策定だ。より詳しく見ると、10km/h以下での自動パーキング、車線維持機能では、ドライバーがステアリングホイールを握った状態と、手放しの状態、さらにはドライバーがウインカーを操作しての自動的な車線変更をシステムが判断し、ドライバーが承認して行なう自動的な車線変更、つまりレベル3の自動運転まで見据えた検討が行なわれている。
■レベル2の運転支援システムでの基準が確定
さまざまな検討の結果、まず、クルマが横風、低μ路での直進を維持する、また車線はみだし防止、道路逸脱防止などを防ぐための自動的な補正操舵に対しては、ドライバーが5kg・m/s2の力でオーバーライドできること。そして、補正操舵介入時には、ドライバーに対してメーターパネルなどのディスプレイで視覚的に知らせること、補正操舵の介入が10秒~30秒を超える場合は警報音を鳴らすこと、180秒間ドライバーによる操舵がなく、2回以上補正操舵が介入する場合は警報音を鳴らすことというのが基準として確定した。
自動パーキングについては、10km/h+2km/h以下での作動に限定され、システムの動作条件が整い、ドライバーがスイッチを押すなど操作後に動作すること、またドライバーが動作をいつでも終了できること、自動パーキングでアクセル、ブレーキを自動で作動させるシステムでは操舵エリアにある障害物(車両や歩行者など)を検知し、衝突を避けるために車両を停止させることが求められる。
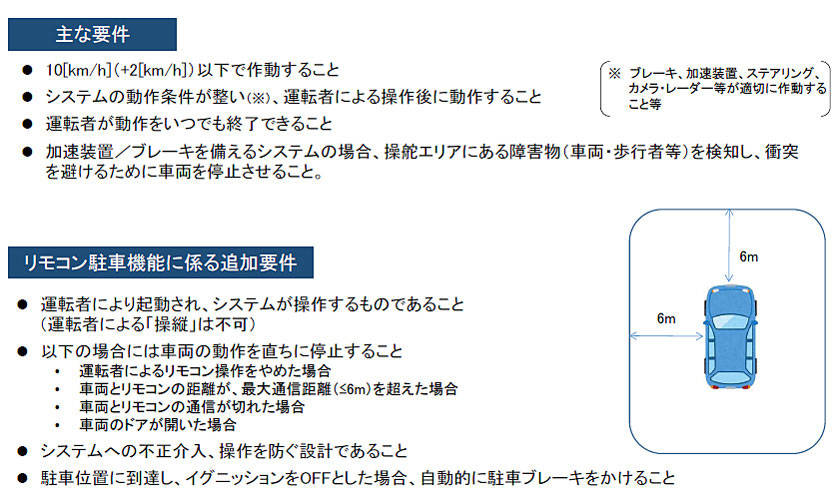
またリモコンによる自動パーキングでは、ドライバーがシステムを作動させることとされ、ドライバーがリモコン操作を中止した時やクルマとドライバーの距離が6mを超えた時、そしてクルマとリモコンの通信が途切れた時、クルマのドアが開いた時は直ちにクルマが停止するシステムであることが求められる。

さらにシステムへの不正介入、操作を防ぐ設計であることや、駐車位置に到達しイグニッションをOFFとした場合、自動的に駐車ブレーキをかけることも求められる。
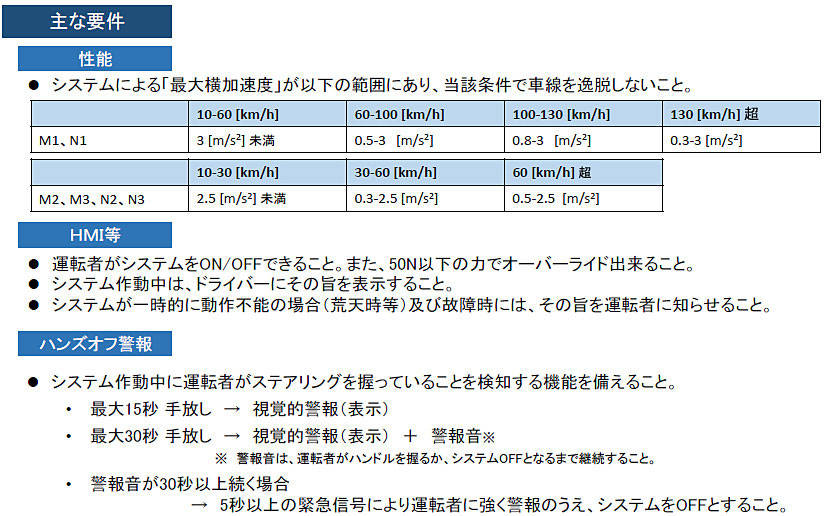
次は車線維持機能についてだ。自動車線維持機能については、一定の最大横加速度以下であること、車線を維持し続ける機能を持つことを前提に、ドライバーがシステムを任意にON/OFFできること、505kg・m/s2以下の力でオーバーライドできること、荒天時などにシステムが一時的に動作不能の場合や故障時には、その状態をドライバーに表示できることが求められる。
また車線維持機能が作動中に、ドライバーがステアリングホイールを握っていることを検知できる機能を備えることも求められる。
そしてドライバーが最大15秒手放しした時は視覚的警報(表示)、最大30秒手放しの状態では視覚的警報(表示)にプラスして警報音が追加され、その警報音は、ドライバーがステアリングホイールを握るか、システムがOFFとなるまで継続すること、さらに警報音が30秒以上続く場合は5秒以上の緊急信号によりドライバーに強く警報のうえ、システムをOFFとすることとされている。

つまり、ドライバーの手放しが15秒続くと警報表示、30秒で警報表示+警報音、さらに警報音が30秒以上継続すると、5秒の強い警報を行なった上でシステムが解除される。言い換えると65秒間の手放し運転でシステムは自動解除されることになるのだ。
■自動運転に関する検討
国連欧州経済委員会・自動車基準調和世界フォーラムの専門部会では、来るべき自動運転時代に向けての議論も始まっている。当面の課題は、レベル2、レベル3でのドライバーの位置付けだ。
まず、レベル2~レベル5というアメリカのSAEの定義に関しては、自動車基準調和世界フォーラムもこの定義に準拠している。
・レベル2:システムが対処できない状況がある(=常時、ドライバーによる監視が必要)。
・レベル3:予め設定された使用条件において、動作環境が整う場合には、システムが対処。動作限界に達した場合には、ドライバーに警報のうえ、運転を安全にシステムからドライバーに受け渡す。
・レベル4:予め設定された使用条件において、いかなる状況でもシステムが対処。使用条件の終了時(例:高速道路からの分流等)には、ドライバーに警報のうえ、運転を安全に受け渡す。
・レベル5:如何なる状況でも、システムが対処(=ドライバーは不要)
こうした高度運転支援システム、自動運転に関しての定義をした上で、レベル3以上は、ジュネーブ条約には新たな対応が必要とされる。つまりジュネーブ条約では、自動車はいかなる場合もドライバーが操縦することが義務付けられているからだ。ただし、ジュネーブ条約には多くの国が加盟しているが、こうした自動運転の推進、実用化ということに対し積極的に取り組む国はまだ少ないため、条約改定には時間がかかると予想されている。
最も現実的な、現在のレベル2(複数の運転支援システムの使用)、レベル3(高度運転支援システム=高速道路などでの自動運転)では、レベル2は例えステアリングホイールの手放し運転状態でもドライバーは運転義務があり、それ以外の作業(セカンドタスク)を行なうことは厳禁される。


レベル3では、高速道路などではクルマのシステムによる自動運転が行なわれ、ドライバーはその間には、ビデオを見たり読書したりというセカンドタスクが認められると考えられている。

ただし、クルマには自動運転の継続が不可能な場合、ドライバーが直ちに運転を行なう必要がある。そのためにドライバーがすぐに運転できるかどうかのドライバーモニタリング・システムが必要で、ドライバーが運転できない場合はクルマが自動的に路肩に停止するといったシステムも求められる。
現在では、ヨーロッパなど大陸国では国境を超えてクルマが走行するため、国際的なクルマの技術基準の統一化、運転支援システムの概念の統一化が必須となっているが、そうした観点とは別に、自動運転における法的な位置付け、ドライバー、自動車メーカー、行政のそれぞれの法的な責任についての国際的な統一、合意がなければ技術的には可能な自動運転も絵に描いた餅に終わってしまうことも考えられることは注目すべきだろう。













