トヨタは2019年2月28日、同社の自動運転技術を研究・開発している、カリフォルニア所在のトヨタ・リサーチ・インスティテュート・アドバンスト・デベロップメント(TRI-AD)と、アメリカのCARMERA社は、高精度地図の自動生成に向け、一般道での実証実験を共同で行なうことに合意したと発表した。
TRI-ADはAutomated Mapping Platform(AMP)というオープン・ソフトウェアプラットフォーム上で、参加企業から得た自動運転車両のデータを共有し高精度の地図を作り共有するという構想を持っており、今回の実証実験はその第一歩となる。
自動運転の実現のためには、3次元のデジタル化された高精度な地図データ基盤による信頼性の高い道路情報の提供が不可欠だ。現在は高速道路を中心とした地図作成が進んでいるが、そのカバー率は全世界の道路ネットワークの1%未満と言われており、次のステップとして高速道路以外での地図作成が課題となっている。
今回の実証実験で2社は今後数ヶ月間に渡り、トヨタの市販車に搭載されているカメラを試験車に搭載し、東京の市街地のデータを取得する。そして、そのデータをもとに高精度地図を自動的に生成する実証を行なうことにしている。

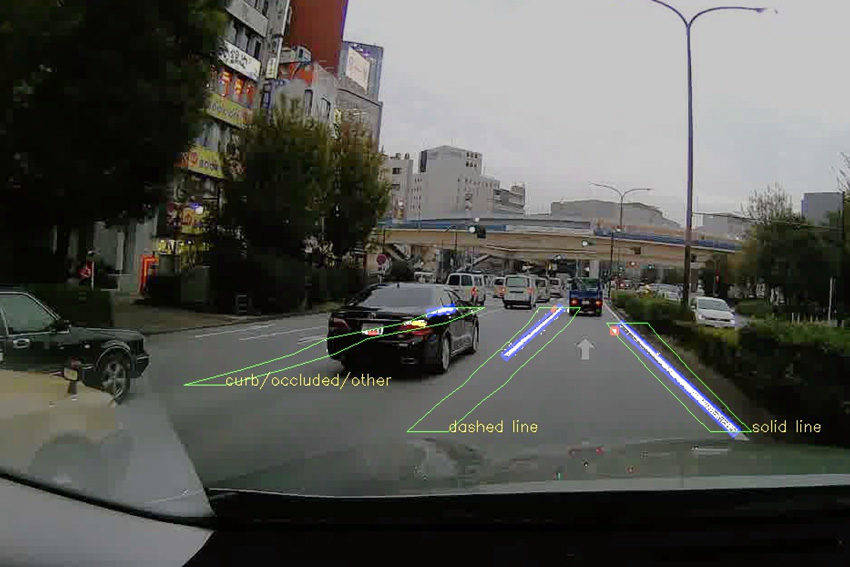
この実証実験には市販乗用車を使用するため、試験車に搭載するカメラは、トヨタがグローバルで車両に搭載しているトヨタ・セーフティセンスのコンポーネントを使用する。トヨタ・セーフティセンスからの画像データをCARMERAのリアルタイム・プラットフォームで処理し高精度地図を生成する。
さらに、試験車に搭載する市販のドライブレコーダー(デンソー製)を搭載し、その画像データも利用することで、トヨタ・セーフティセンスを搭載していないフリート車両からのデータ自動生成も合わせて実証するとしている。













