日産自動車は2025年9月22日、2027年度に国内投入を予定している次世代運転支援技術「ProPILOT」の開発試作車によるデモンストレーションを、東京・銀座で実施しメディア向けに体験走行を行った。

開発試作車はEVの「アリア」をベースとしており、複雑な都市部の交通環境に高度に対応して安全に走行する様子をアピールした。

日産は、Wayve社(本社:英国ロンドン市)の「Wayve AI Driver」ソフトウェアと、次世代LiDARによる「Ground Truth Perception」技術を活用した次世代ProPILOTシステムにより、運転支援技術の新しい基準を生み出そうとしている。
次世代運転支援技術「ProPILOT」は、ドライバーの交通環境の監視義務があり、危険を感じた場合はいつでもドライバーが運転を行なうことができるレベル2.5の高度運転支援システムである。

従来の手放し運転が可能なレベル2.5の高度運転支援システム、さらにホンダが市販化したレベル3の自動運転は高速道路、自動車専用道路に限定されているが、今回、日産が発表した次世代運転支援技術「ProPILOT」は、高速道路だけではなく市街地の道路でもハンドルは手放しで、ペダル操作もしないで走行できるレベル2.5の高度運転支援システムである点が注目点だ。ただし、現状では日本では認可されていない。
この新システムはエンド ツー エンド(E2E)技術を採用したNOA(ナビゲーション オン オートパイロット)と呼ばれる最新技術である。
エンド ツー エンド技術を使用するナビゲーションシステムとは、従来の複雑な工程を経て作動するナビゲーションと運転支援の処理を、単一の人工知能(AI)モデル で一貫して行なうシステムであることを意味する。
また、NOA(ナビゲーション オン オートパイロット)は、ナビ上で目的地を入力すれば、経路の自動選択が行なわれ、走行中はハンドルの手放し、ペダル操作なしの状態で目的地に到着できる技術を意味している。
従来型のナビゲーション、運転支援システムは、カメラ、LiDAR、、ミリ波レーダー、GPSなどのセンサーから環境データを取得。より詳細な自車の環境、位置を把握するための高精度地図データの取得、そして取得したデータから、車両、歩行者、標識、道路などを検出・識別する。そしてGPSでの位置情報、車速などのデータから、自己位置を特定し、検出した情報をベースに周囲の詳細な地図(高精度地図)を生成または高精度地図データを参照して適合させる。
つまり出発地から目的地までの大まかなルートを計画し、次の数秒~数10秒で、障害物を避けながらの細かい動き(車線変更、曲がり角での速度調整など)を計画し、計画された経路に従って、ハンドル、アクセル、ブレーキを実際にどう動かすかを演算。ようやくクルマの動きを制御するという、複雑な工作業が行なわれているのだ。
つまり、システム全体が複雑で、これを設計したり実際の走行状態に調整するために膨大な時間、作業数が必要であった。
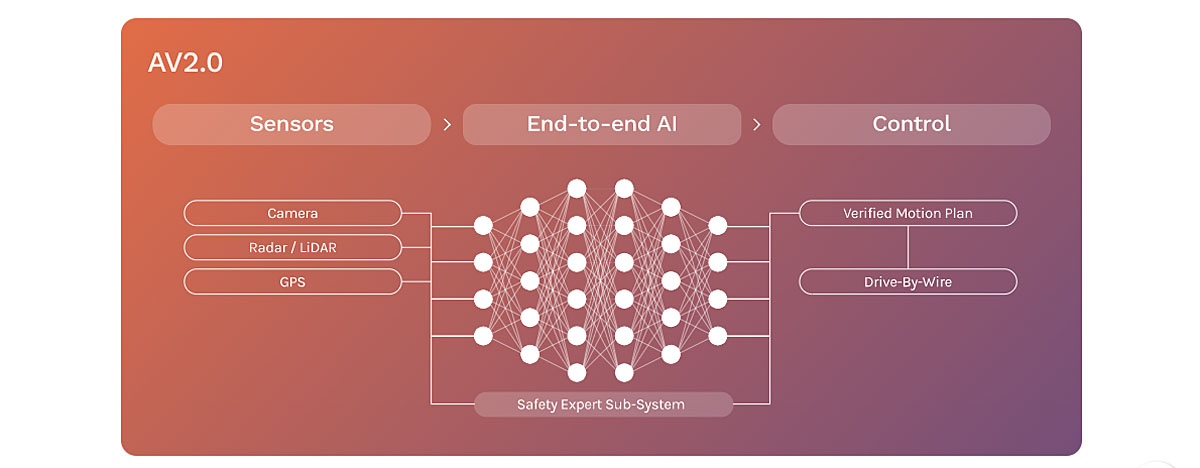
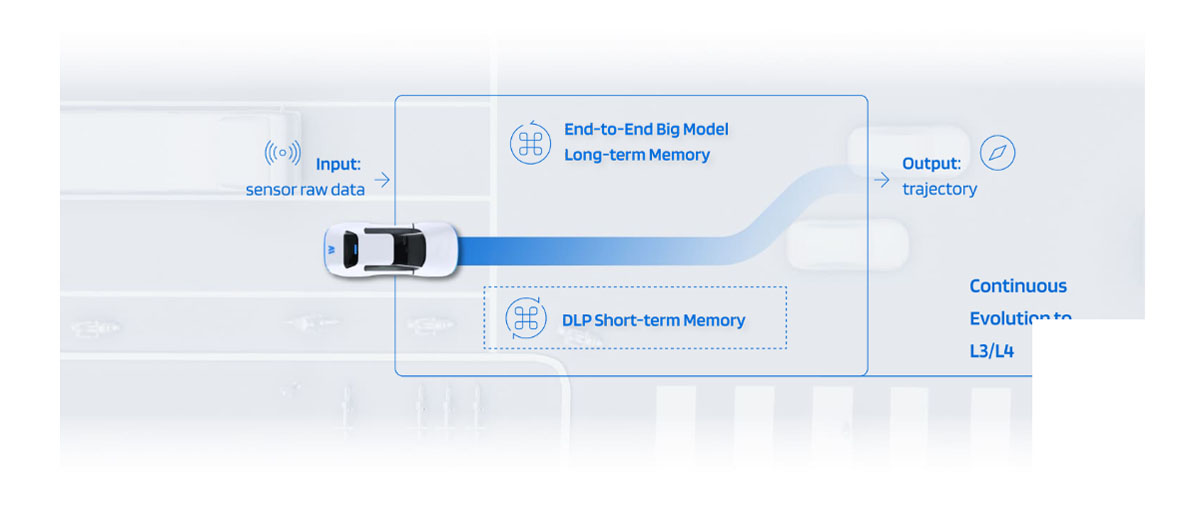
これに対して、エンド ツー エンド方式では、複雑な工程をすべて単一のAIによるディープラーニングモデルに置き換えている。データ入力としては、カメラ画像やセンサーデータなどの生データを使用し、AIの学習した思考にしたがって、交通状況を把握、予測し、ハンドル角度、アクセル開度、ブレーキ力といった、直接的な制御コマンドを発生させる仕組みだ。
つまり、カメラ、レーダー、LiDARなどからのデータと簡単な地図データを使用し、AIは道路や障害物を、交通状況を把握し、進むべき方向に合わせて、ハンドルを切り、速度を調整し、障害物は回避しながら目的地に向かうという行動を出力することができるというわけ。
AIの思考はセンサーによって把握された状況に対して0.1秒単位で判断を決定している。また同時に、判断には学習によって得られた予測情報も含まれている。したがってエンド ツー エンド技術による運転支援システムは、熟練したドライバーに相当する運転技術を持っているとも言うことができる。
ただし、AIはディープラーニングモデルを使用するため、多様な交通状況や多様な障害物、道路上で生じる危険などを学習する必要がある。そうした学習が一定レベルに達すると、ローカライズするのに要する時間は数ヶ月レベルで済むとされている。
ちなみにテスラの例では、全世界600万台以上のテスラ車両から収集した10億マイル(16億km)以上の走行データを学習しているという。
エンド ツー エンド技術はこのように全面的にAIのディープラーニングに依存するため、現時点では完全なシステムとはなりえないので、並列的にカメラやレーダーなどによる認識モジュールを組み合わせたNOA(ナビゲーション オン オートパイロット)が主流になり、同時に緊急自動ブレーキなどの安全システムも組み合わされている。
日産の次世代「ProPILOT」は、イギリスのWayve社(本社:ロンドン市)の「Wayve AI Driver」ソフトウェアと、ルミナー社製の次世代LiDARによる「Ground Truth Perception」は、LiDARなど高度なセンサー技術を駆使して周囲の状況を高精度に3次元計測し、複雑な状況下でも的確な緊急回避操作が可能な技術を活用している。
エンド ツー エンド技術を採用したNOAの現状
エンド ツー エンド技術を採用したNOAのパイオニアはテスラである。テスラはフルセルフ・ドライビング(FSD)システムと呼ぶシステムを投入しており、レベル2.5の高度運転支援システムを市販化し、高速道路だけでなく市街地でも手放しハンドル、ペダル操作不要で目的地に到着できることをアピールした。

これをドライバーの監視義務を不要にした自動運転と誤解される傾向にあるが、エンド ツー エンド技術を採用したNOAであり、ドライバーは交通監視義務があり、いざという時には自分の手で運転する必要がある。
そのため、テスラは改めて監視義務付き(Supervised)フルセルフ・ドライビング(FSD)と呼称している。
なお、エンド ツー エンド技術を採用したNOAは、アメリカや中国などでは認められているが、日本では現状は認可されていない。
テスラは日本市場にも導入すべく、日本での公道環境を学習させるために公道テストを実施しており、おそらく日産と同時期に国交省の認可が得られると予想される。
テスラをキャッチアップし、エンド ツー エンド技術を採用したNOAの開発に全力で取り組んだのが中国である。すでに中国ではスタートアップ企業のモメンタ(北京初速度科技)社、ポニーAI(小馬智行)社、ホライゾン・ロボ(地平線)社、大手IT企業のファーウェイを始め、自動車メーカーのBYD、シャオミ、NIO、理想、小鵬などが自社開発のエンド ツー エンド技術を市販化している。
特にモメンタはテスラに勝るとも劣らない業界リーダーで、トヨタ、ホンダ、東風日産、上海汽車、フォルクスワーゲン、メルセデス・ベンツ、BMW、アウディ、GMなどが続々と現地モデルに採用している。
BYDはエントリーモデルにまで自社開発したエンド ツー エンド技術「天神之眼」を採用することを発表するなど、一部の高級車だけでなく普及モデルまで採用が加速している。
各社はいずれもAI技術を投入しており、上級モデルにはLiDARも搭載されている。
エンド ツー エンド技術を採用したNOAは、現在のレベル2.5だけでなく、近い将来のレベル4自動運転を視野に開発競争が行なわれており、アメリカ、中国では無人タクシー、無人バスの公道での実証実験も進められている。
日産の次世代ProPILOT
今回公開された次世代ProPILOTの開発試作車には、11個のカメラ、5個のレーダーセンサー、1個の次世代LiDARセンサーが搭載されている。

WayveのエンボディドAIは、周囲のすべての情報を包括的に把握し、次に起こること、自身の行動が及ぼす影響を予測する能力を持ち、熟練ドライバーのような周囲に調和した安全な運転をすることを実現。さらに、高速な処理能力により、急な状況の変化に直ちに対応できるように備えた安全運転を行なう。
また、WayveのAIは、人間の認知や行動のプロセスの洞察に基づき、個々の物体の動きに対する反応を学習するのではなく、周囲のすべての状況変化の過程学習に重きを置き、多様な現実世界の事象を学習している。これにより、経験を積んだ注意深い人間のように複雑な状況でも予測を行ない、的確な判断、操作をすることができるとしている。

次世代ProPILOT搭載車両は、ルミナー社製の高性能LiDARセンサーをルーフに搭載している。これは、Ground Truth Perception技術の重要な構成要素の一つとされ、LiDARは、並列処理を行ない、通常は100m程度のカメラの認識距離よりも遠方を正確に認識でき、高速走行時やカメラの検知距離が限定される夜間走行時により安全性を高めるため、並列処理を行なっている。
エンド ツー エンド技術を採用したNOAは、テスラを筆頭に、中国勢が圧倒的に世界をリードしてきているが、日本では日産が名乗りを上げ、日本における認可の取得、実用化のリーダーになるのではないだろうか。













