制振制御
まず第1は、状況に合わせてモーターのトルクを制御することで、車体のピッチングを抑え、乗り心地を向上させることだ。実は、従来のリーフやトヨタの・プリウスでも凹凸の乗り越えになどに瞬時にトルクを微調節して車体のピッチングを抑えるライドコントロール(制振制御)が採用されている。
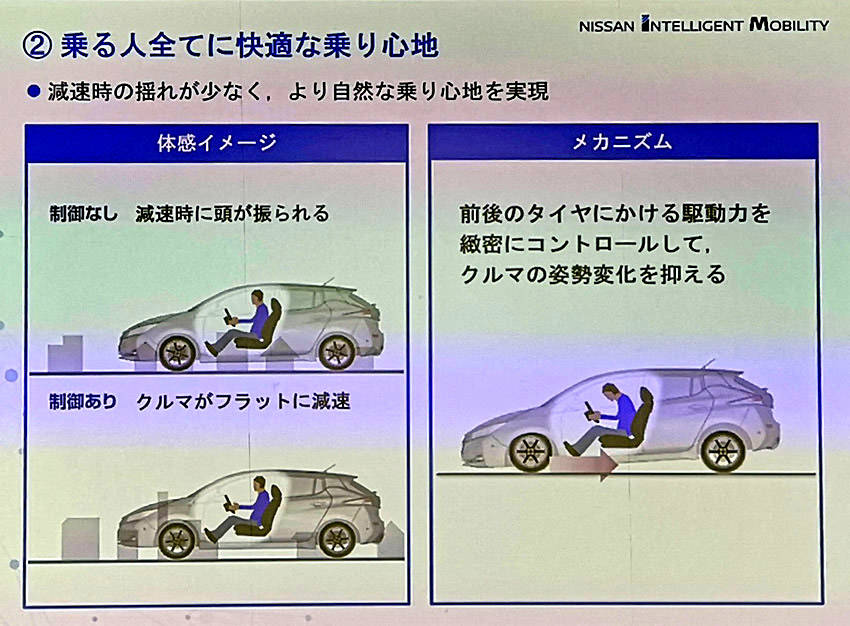
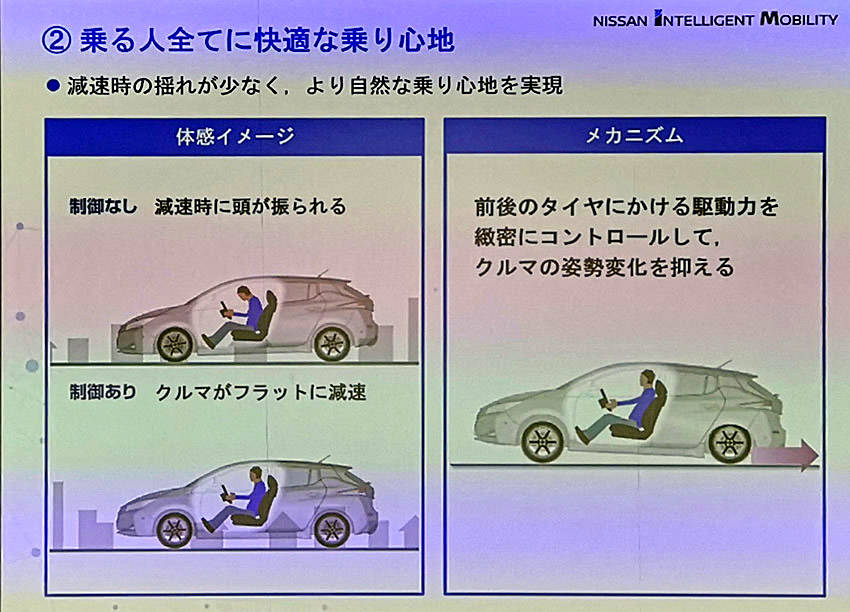
しかし、このテストカーは前後にモーターを搭載しているので、前後のモーターの制振制御で、より大きな効果を引き出すことができるのだ。具体的には、ブレーキング時には前向きの力が加わり、頭部は前方に振られる。しかし減速時には、前後のトルクを瞬時に制御し、ピッチングのモーメントの初期の動きを少なくするようにモーター・トルク制御することで、ピッチング・モーメントを弱め、乗員の体の前倒れのフィーリングを弱めることができるのだ。
ハンドリング性能
コーナリングでは、4輪のタイヤのグリップ力をフルに発揮できることで、低速から高速までより正確に、ドライバーの意図通りのハンドリング性能を実現することが可能になる。

まず、日常のドライビングでは、ステアリングの操舵に合わせてモーターのトルクを瞬間的に制御し、前輪の荷重を増加させることで、よりスムーズにステアリングを効かせることができる。いわゆるGベクタリング・コントロールの効果を利用している。
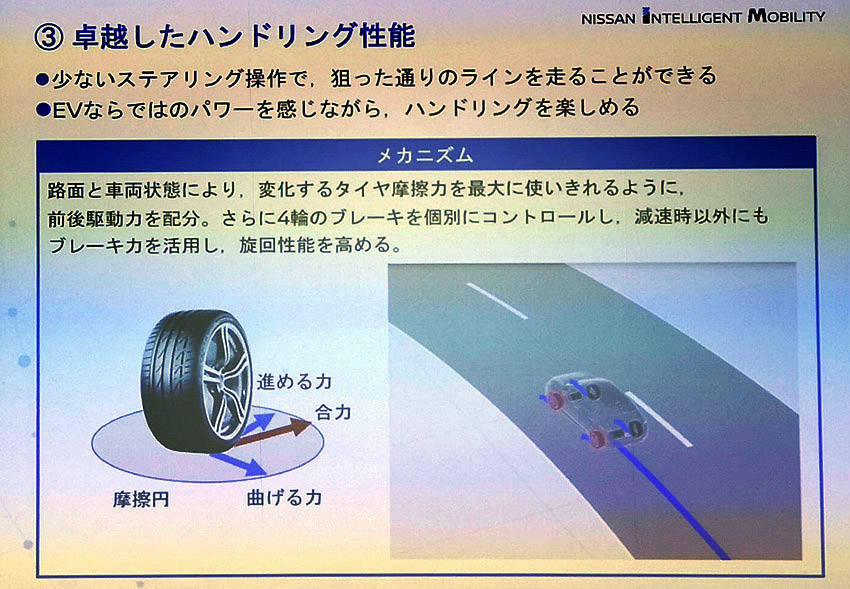
ドライバーのアクセルの踏みこみは一定でも、ステアリングを切るタイミングに合わせてフロント・モーターのトルクをごく短時間だけトルク・ダウンさせ、前輪に荷重を移動。タイヤの摩擦円を大きくすることで、あたかもステアリングの効きが高まる効果を生み出し、より少ない操舵で意図通りの走行ラインを走ることができるのだ。
さらに、より高速域ではコーナリングの状態に応じて前後のモーターのトルクを制御し、さらにはブレーキの4輪独立制御を行なうトルクベクタリング効果を引き出す。大雑把に言うと、前後のトルク配分を制御することで、アンダーステア傾向になる直前にリヤのトルクを増大させ、逆にオーバーステア状態になる直前にはフロントのトルクを増大させという、前後のトルクの可変配分を実現したシステムといえる。
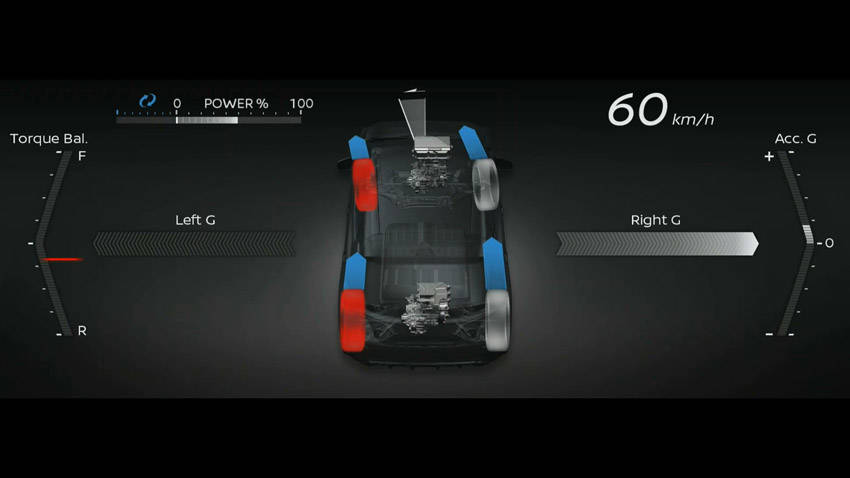
この制御は、目標ヨーレートに合わせた前後モーターのトルク配分と、4輪独立のブレーキ介入を行なうことでドライバーが狙った走行ラインを走り続けることができるという原理だ。もちろん、こうした運動制御はエンジン車でも可能だが、モーターの場合はエンジンのトルク制御よりはるかに高速で、高精度に行なうことができるため、より運動性能の向上に貢献できる。これも電動化により、もたらされる大きなメリットだ。

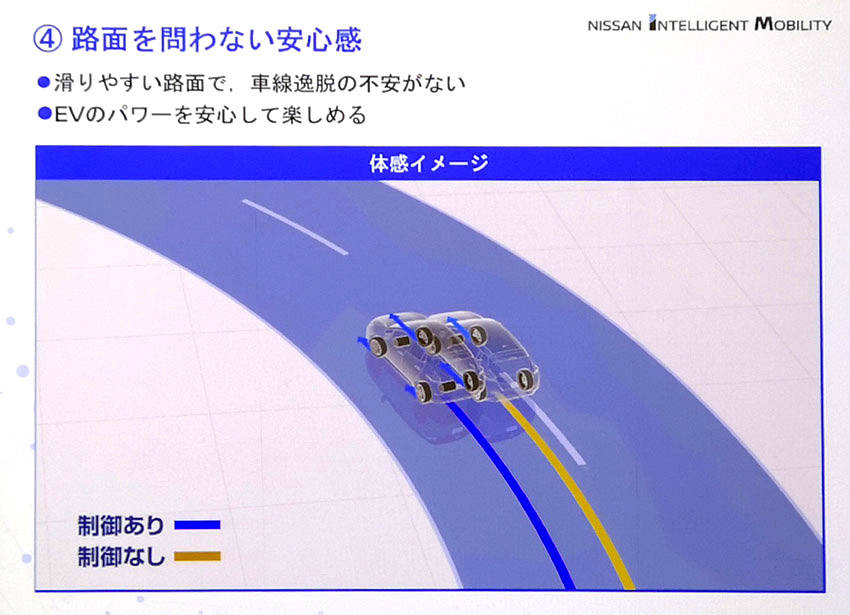
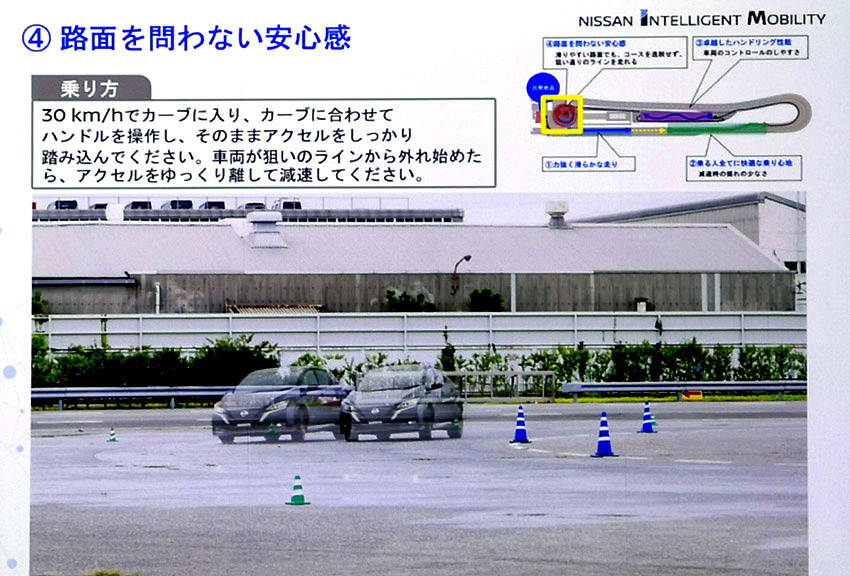
またコーナリングの限界域でも、横滑り防止装置(VDC)と前後のモーターのトルク可変制御を合わせることで、よりクルマのライントレース性を高めることができる。トルク制御をオフにした時はアクセルの踏み込みに対してアンダーステアとなり、定常円から外側に膨らんでいくが、トルク制御をオンにすると円周上の走行ラインをキープすることができる。

今回はR30のウエット状態の定常円を30km/hで緩加速していくテストで、制御なしでは40km/h程度で強めのドリフトアウトのアンダーステア状態が生じるが、制御ありではドリフトアウトの姿勢にならず、より高い車速まで定常円の旋回を維持できることが体験できた。

このように2基のモーターを使用した電気駆動4WDは、単に4WDというだけではなく、エンジン車を遥かに上回る運動性能を生み出す異次元の走りを実現し、その事実を十分認識することができた。しかもモーターのパワー、トルクもスポーツカー並みのレベルにあり、これまでにはなかった、新たな電気自動車像を予感することができる。
【電気駆動4WD実験車の主要諸元】














