日産は2019年5月16日、新開発した高度運転支援システム「PRO PILOT(プロパイロット)2.0」の技術を発表した。この新しい「プロパイロット2.0」の搭載第1号車は2019年秋、日本で発売するスカイラインに搭載する予定としている。

システムの概要
従来の日産の運転支援システム「プロパイロット」を大幅に発展させた「プロパイロット2.0」は、高度運転支援システム(ADAS)に位置づけられ、概念的には自動運転レベルの2.5に相当する。つまり高速道路を走行中、ドライバーは常に走行状態、周囲の交通環境を確認する義務はあるものの、アクセル、ブレーキ、ハンドルをシステムに任せる手放し運転が可能になっているのだ。したがって「半自動運転」と呼ぶこともできる。
日産の従来の運転支援システム「プロパイロット」は、車両側のセンサーとしては単眼カメラのみを搭載していたが、新開発のプロパイロット2.0は、センサーを多数搭載し、360度の物体検知が可能になっている。
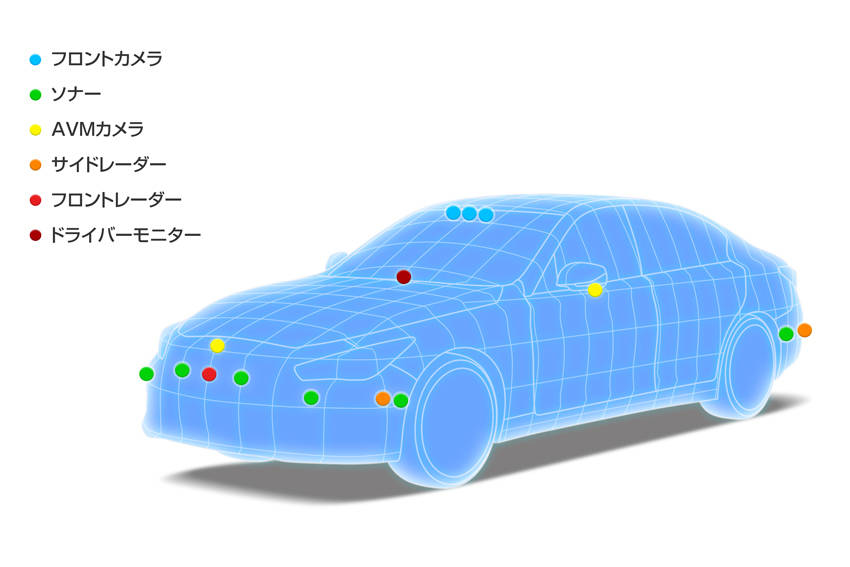
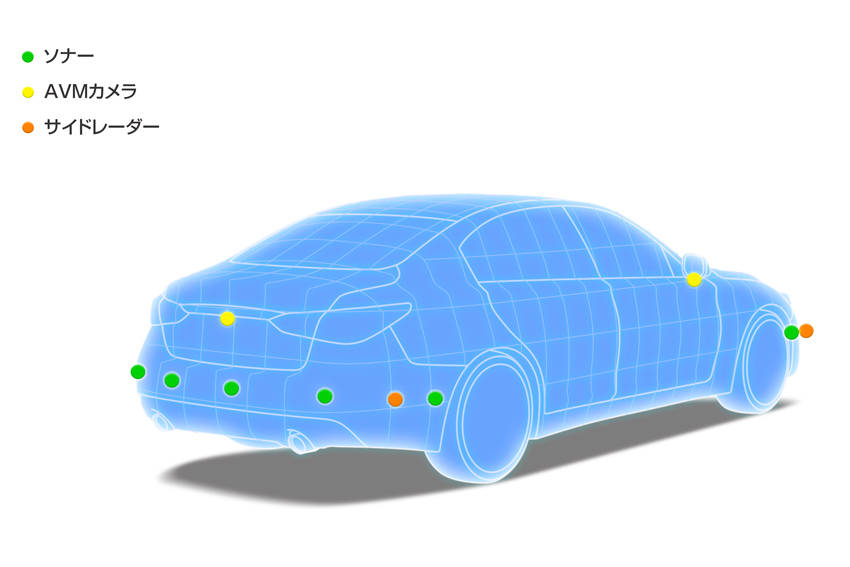
センサーは、ミリ波レーダーがフロント(長距離)用×1、フロント&リヤ・サイド(短距離・広角)用×4、車両全周の超音波ソナー×12、そして360度の視界を持つアラウンドビューカメラ×4、前方カメラとしてトライカム(3眼カメラ)という配置だ。

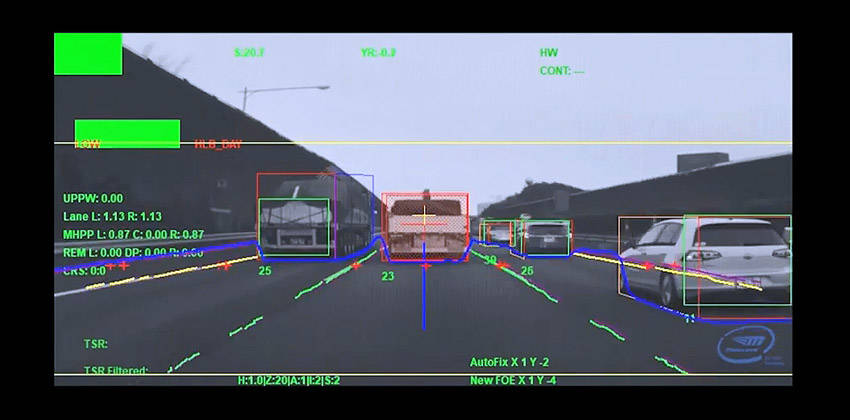
3眼カメラは各カメラの画角が広角:150度(検知距離20m)、標準:54度(検知距離:120m)、望遠:28度(検知距離300m)という3種類のカメラを組み合わせて一体化したもので、望遠から至近距離までの物体を検知できるようになっている。ちなみにこの高性能3眼カメラは、新型BMW 3シリーズに採用されているものと同等でZF製と思われる。また画像認識はモービルアイの技術を採用している。
そしてこれらの多数のセンサーからの情報を、統合制御するための専用ADAS ECUを搭載している。このように従来のプロパイロットに比べ格段にセンサーが充実されており、走行中の車両の360度、二輪を含む車両を検知できるようになっている。
そのため、より正確な車線検知(レーンキープ)性能、長距離、つまりより早期に危険を検出できる機能、より広角の広い範囲で車両周辺の危険を検知できる機能が与えられている。

3次元デジタルマップを搭載
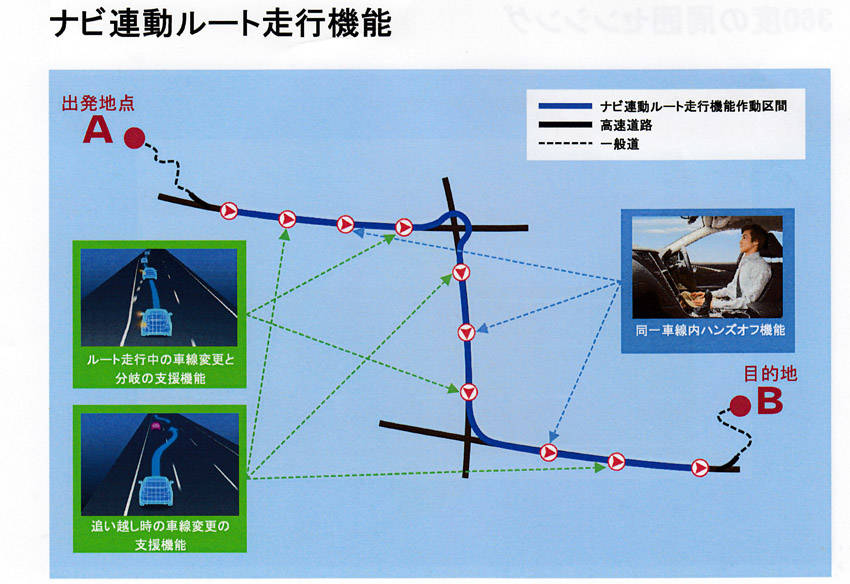
さらにプロパイロット2.0は、高速道路上での正確なステアリング・アシスト、走行するレーンの判別、走行位置の確認のために、全高速道路情報をカバーした高精度な3次元デジタルマップを車載のマップコントローラー内に搭載している。ちなみにこの高速道路の高精度な3次元デジタルマップを搭載した運転支援システムは世界初となる。そしてこの3次元デジタルマップと360度センシングを併用することで、世界初の「ナビ連動ルート走行」機能が実現している。
つまりカメラによる映像認識と3次元デジタルマップを照合することで、自車が高速道路上のどの地点のどの位置にいるかを検出し、進行ルートにマッチするようにステアリング支援を行なったり、直進時は手放しの運転が実現しているのだ。
車両ではGPS信号により大まかな自車位置を検出し、3次元高精度マップと実際のカメラによる映像を重ね合わせ、自車位置を検出するが、その位置精度は左右方向で5cm以内、前後方向で1m以内という高いレベルにある。
そのため、例えば3車線のどの車線にいるか、ジャンクションやインターチェンジ出口でどの車線にレーンチェンジすべきかをシステムは正確に判定することだできるのだ。また前方カメラやレーダーでは補足できない、見通しの効かないブラインドカーブの前方の道路の曲率や勾配、登り下りなどの道路情報も3次元マップにより取得できるため、より余裕を持ってシステムは操舵アシストや加減速を行なうこともできる。
このように高度運転支援システムと高精度な3次元デジタルマップ情報を組み合わせることで、レベル2.5のADASが実現している。そのため、3次元デジタルマップの地図更新はテレマティックス、つまり車載の常時通信システムを使用し、年間で複数回行なうことで、フレッシュな地図情報が確保されるようになっている。このような、3次元デジタルマップを使用したADASは世界初だ。
ちなみにこの3次元デジタルマップ・データは、ダイナミックマップ基盤の3次元地図共通基盤データをベースに、地図データ企業のゼンリンが独自に収集・整備した情報を加えた地図データである。
インターフェース
このように、直進走行時はステアリングから手を離した状態で走行でき、ナビ連動ルート走行を行なう場合は、出発地から一般道路では通常の運転支援システムで走行する。そして高速道路のインターチェンジ入口から出口までの間では、直進時は前走車に合わせて手放しの追従走行をし、前方のクルマを追い越す場合は、システムが追い越すかどうかの選択肢を表示し、追い越しボタンを押すと、ドライバーはステアリングに手を添えた状態でステアリング・アシストが作動する。また元の車線に戻る場合も同様だ。

そのため、道路や自車の周囲の交通状況とシステムの作動状況を常にドライバーに知らせるため、ドライバー正面のメーターディスプレイ部には、360度センシングの状態を、つまり自車と周囲の他車との位置関係を表示し、さらに追い越しなどで車線変更が必要なタイミングでは「追い越しますか?」というシステムからの提案が表示されるようになっている。


ドライバーは、そうした表示を見てステリング状の「追い越し」スイッチを押すと、レーンチェンジし、追い越しが終わると元のレーンに戻るという一連のシステム作動が実行される。この間はステアリングに手を添えている必要があるものの操舵アシストが行なわれる。
このように常時、周囲の交通状況とシステム側からの提案に対するインタラクティブな関係が明瞭になるようにマン-マシン・インターフェースが実現している。


なお、手を放した状態での運転はもちろん、走行中は常時ドライバー・モニターカメラが作動しており、例えばドライバーが居眠りしたり、脇見を続けているような状態では警報、警告表示が段階的に行なわれ、ドライバーが正常に反応しない場合は最終的にクルマは停止するようになっている。このドライバーモニター・システムが採用されることで手放し運転が認められているのだ。
すでにBMWは2019年夏に60km/h以下での、主に渋滞追従時の手放し運転を実現すると発表しているが、日産はスカイラインに搭載し、高速道路でのレベル2.5のADASを実現しようとしている。日産は2013年に、日本では最も早くから公道上でのADAS、自動運転の実証試験を開始しており、今回のプロパイロット2.0はこうしたデータの蓄積から生まれたといえよう。プロパイロット2.0について、日本市場ではスカイラインに初搭載されるが、その後は新型車にも搭載され、さらにグローバルにも展開するとしている。













