マツダは2021年11月4日に先進安全技術のCo-Pilot技術を発表した。これに先立ちマツダのテストコースがある広島県三次で先行体験試乗をしてきたので、その詳細をお伝えしよう。
100年に一度の変革期を迎えている今、クルマの電動化と並行するように自動運転技術も日々進化を続けている。運転好きドライバーにとって自動運転は不要な存在だろうが、マツダはクルマの安全安心に対してさまざまなアプローチをしており、そうした中で自動で操作されるものも含まれている。

人の状態を知る
まずマツダの基本安全技術のベースは、クルマからアプローチしたもので、視界がいいとか、よく見えるといった視認性の確保やドラポジなど運転に集中できる環境づくりからはじめている。そして、次のステップとしてセンサーを使った、i-ACTIVESENSEによるリスクの感知、注意喚起を行なっている。そして今回発表したCo-Pilotは、その安全安心へのアプローチをクルマから人とへと変え、「人の状態」から安心安全へつなげるというステージに挑戦している。それがCo-Pilotコンセプトである。


もちろんクルマのセンシング技術やリスク回避するための進化は継続しているが、クルマの事故の95%以上が運転操作ミスに起因するというデータからも、人からのアプローチが必要だと考えたわけだ。
マツダのクルマづくりには「人間中心」というキーワードがあり、人の研究をすることで運転が楽しく、そして自らが運転することで活性化されて元気になる。そのことで人生の輝きを提供できると考えているのがマツダの哲学でもある。
したがって、あくまでも人が運転することを前提に開発をしており、そこを踏まえた次世代の安全技術という枠組みになるわけだ。
この安全技術は、人の状態を検知することでリスクの低減につなげていくというもの。つまり、いつもドイラバーを見守り、リスクを知らせることで安心安全につなげるというもの。さらに、ドライバーが運転できない状態となれば、クルマは自動で危険回避を行なうというコンセプトである。ただし、自動運転させることが目的ではなく、運転サポートの立ち位置からの自動運転であり、かつインフラが整備されていない道路環境でも退避することができる技術という位置づけにある。
3つのコア技術は
そのコア技術としてドライバー状態の検知技術がある。姿勢の崩れや頭部の動き、ハンドルやアクセルの操作をセンシングし、総合的に判断していく。このドライバーの異常検知は、その後には予兆検知もできるようになる取り組みもしている。

そしてHMI仮想運転技術と位置づけられているものがあり、ドライバー異常時退避技術のことで、運転できないと判断された場合、ハザード&ストップランプの点滅、そしてクラクションによる車外報知があり、高速道路走行中であれば減速からの停止、車線維持、路肩退避などの異常事退避行動が行なわれる。そして一般道では減速停止、車線維持といった行動で事故を起こさずに退避する技術である。
さらに2025年にはこれらの退避行動がより高度化され、高速道路では自動で車線変更し路肩や非常停止帯を探して停車するといった動きになる。一般道も同様に退避技術の進化はしていく研究をしている。
今回発表したCo-Pilot技術はこうしたドライバー異常時にクルマがどういうことをすれば事故を防ぎ乗員を守れるかという技術であり、いわゆるレベル2やレベル3といった概念とは異なるベクトルで、結果的には完全自動運転される場面もあるものだ。
Co-Pilotの概念としてマツダが説明しているのは、ドライバーを選ばない、特別な操作が不要、一般道でも作動するということが基本になり、そのためのコア技術が先程のドライバー状態検知技術、HMI仮想運転技術、ドライバー異常時退避技術という技術の上に成り立っているわけだ。

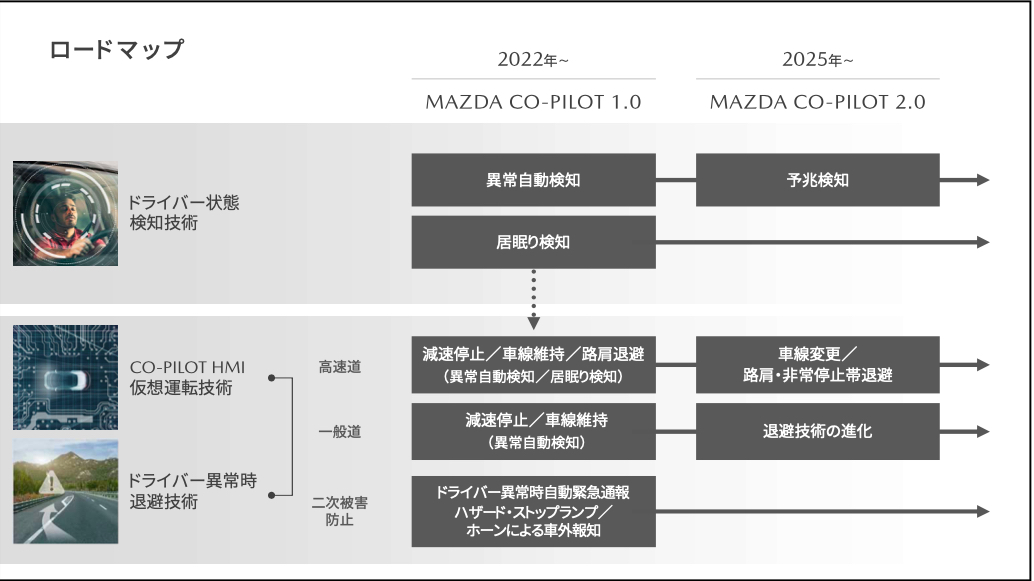
具体的な退避行動としては前述の高速道路の場合、一般道の場合でいつくかの行動パターンがあり、まずドライバーの異常を検知すると走行している車線上に自動停止するCo-Pilotが、2022年以降に発売される縦置きエンジンのラージサイズSUVに投入される。このシステムはドライバーモニターカメラ、ミリ波レーダー、ソナーなど従来から装備されている既存センサーを使用して作動する。

さらに2025年にはCo-Pilot2.0が投入されるロードマップになっている。Co-Pilot2.0は、ドライバーの異常を検知すると、安全な退避場所まで移動して自動停止するシステムだ。このCo-Pilot2.0は自車位置と道路情報が必要になるため、GPS位置情報や高精度マップ情報も必要となる。
このように、マツダのクルマにはドライバー異常時の乗員安全のために完全自動運転で事故回避をすることも含まれている。だからレベル分け技術の土俵にはおらず、自動運転の本来の目的である事故ゼロの目標をマツダなりの解釈と技術で進化させているということになる。

ここでもう少し具体的に、どのような技術が開発されているのかお伝えしよう。
その一例としてドライバー異常検知技術の分野でプレゼンテーションがあった。これまでは車両のふらつき、眠気や脇見という行動結果を直接的に見る技術を積み上げて市場投入してきたが、次のステージとして、人の内部状態を推定するという技術に挑戦している。
特に病気による異常は4つの疾患から起きていることが分かっているという。言い換えれば人の異常行動は脳の疾患に起因するものが殆どで、その疾患は4つに分類できるという。
それは、脳神経システムの異常といわれる「てんかん」、脳血管疾患であれば脳細胞の死滅、そして低血糖・心疾患は、脳細胞への酸素、栄養供給低下といったことが原因で、これらすべてが脳機能障害の症状が出ることが分かっているという。
その中で、脳機能低下の症状はおおきく2つに分かれると説明する。症状が発症して急激に機能低下するケースと徐々に機能低下していくケースの2パターンだと。
徐々に機能低下していくケースでは大脳が担っている意識的な行動に変化が起こり、次に脳幹が担っている無意識的な反応が生じるという、内部の反応メカニズムに着目すれば異常をいち早く察知できるのではないか、というように考えたわけだ。これらは大学の専門研究機関からの情報、データをもとにマツダが研究しているものだ。
もう少し詳しく説明すると、視線挙動の変化に着目してみると、正常な状態でも意識的な能動的な視線移動と無意識的な受動的な視線移動、つまり目立つものに視線が集中してしまうというパターンがあるそうで、そうしたことをより深堀りしていけば予兆検知が可能になるだろうと研究を進めているわけだ。
その結果、脳に何かの発症があり徐々に機能が低下してくときは、この目立つものに視線が集中し、能動的な視線挙動が減っていくことが分かったという。

そこで、脳科学の知見を取り入れて、脳内の視覚情報処理のメカニズムを計算モデルに置き換え、運転中、どこに注意が惹きつけられやすいかリアルタイムに特定可能なアルゴリズムをマツダは開発したのだ。この注意をひきつけやすいことを「サリエンシー」といい、それを空間上に配置したものをサリエンシーマップと言うそうで、こうしたサリエンシーマップを作ることで予兆検知が可能になるという研究をすすめているのだ。
こうしたことを踏まえて、試乗会では運転操作、頭部挙動、視線挙動のパラメータで総合的に予兆を検知判断し、ドライバー異常が検出された場合のクルマの退避行動を体験するというものだった。
三次のテストコースでは高速道路と見立てた場面で、ドライバーが気を失う演技をすると、すぐさまクルマは自動運転に切り替わり、ハザードとストップランプを小刻みに点滅させ減速。退避スペースを探しながら徐行し停車。そしてSOSコールに自動で繋げオペレーターとの会話が行なわれる。もちろん、応答がなければすぐさま救急車などの要請が行なわれるというものだった。
また一般道を想定したテストコースの試乗では、同様にドライバーが気を失う行動をすると、路肩に止まりSOSコールをするという一連の行動が行なわれた。


ここで注目なのがクルマは今、どんな対応をしているのか?ということをナビモニターと音声で同乗者に伝えていることだ。突然ドライバーが運転中に気を失っても運転を交代することはできない。だがCo−Pilotがすぐさま運転を代わり退避行動をとる。その際「安全に停止できる場所を探しています」とか「減速します」といったことが同乗者にわかるようになっている点も注目だ。

したがって、マツダのCo-Pilot技術はいわゆる運転支援技術とは距離を起き、安全安心技術のための別なアプローチからの安全技術であり、この技術はマツダ車に備わる装備・技術ということになる。言い換えれば、マツダ車にはこの安全装備があり、副操縦士が常にドライバーを見守っているクルマということになるのだ。<レポート:髙橋明/Akira Takahashi>














