ホンダは2021年9月30日、未来の社会に向けた新領域のチャレンジとして、現在取り組んでいる斬新な技術開発を公開しました。

ホンダの研究開発を担う本田技術研究所では、環境と安全の先行技術の研究に加え、モビリティの可能性を3次元や、時間、空間の制限に縛られない4次元、さらには宇宙へと拡大し新たな価値をもたらす独創的な技術研究を進めていることをアピールしています。
空の移動を身近にする「Honda eVTOL」(電動垂直離着陸機)
eVTOL(electrical Vertical Take Off and Landing:電動垂直離着陸機)の開発がまず最初にあげられます。

すでに世界各国のベンチャー企業で、ドローン技術にヒントを得た電動化技術によるクリーン性、シンプルな構造で推進を分散化することで、民間旅客機同等の安全性を保ちながら比較的小径なローターにより、街中で離着陸しても騒音とならない静粛性を実現できる機体の開発競争が活発化しています。
一方で電力のみによるeVTOLは、バッテリー容量による航続距離の課題があり、その現実的な稼働範囲は都市内移動に留まっています。

これに対しホンダは、より航続距離が長く使い勝手の良い都市間移動を実現するため、ガスタービンによる発電を利用するハイブリッド・システムとしたホンダeVTOLの開発に取り組み、市場拡大が見込まれる都市間移動の実現を目指しています。
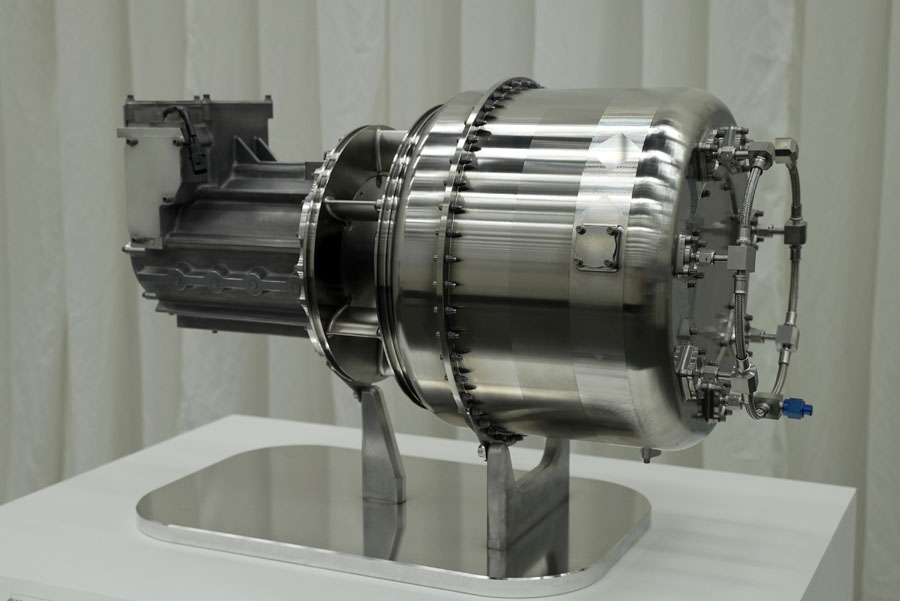
このホンダeVTOLには、電動化技術のほかにも、燃焼や空力、制御技術といったこれまでのさまざまな領域で培った技術が生かされています。
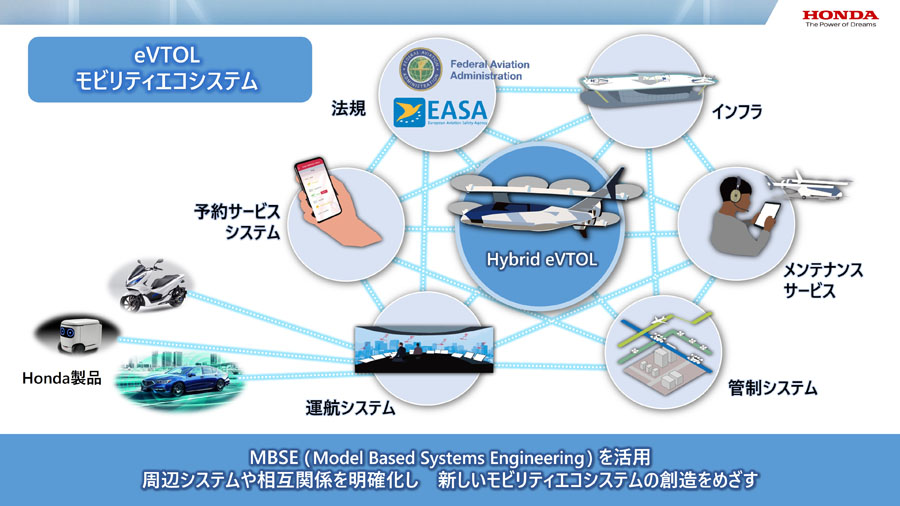
ホンダeVTOLをコアに、地上のモビリティと連携し組み合わせることで、新たなモビリティエコシステムによる新価値の創造を目指すとしています。
バーチャルな移動を可能にする「Hondaアバターロボット」(分身ロボ)
ホンダはこれまでにもASIMOなどロボティクス研究を継続的に取り組んできており、次世代に向けて時間や空間の制約に縛られず、バーチャルに自己能力を拡張するホンダ アバターロボットの実用化に向けた開発を進めていることも明らかにしました。
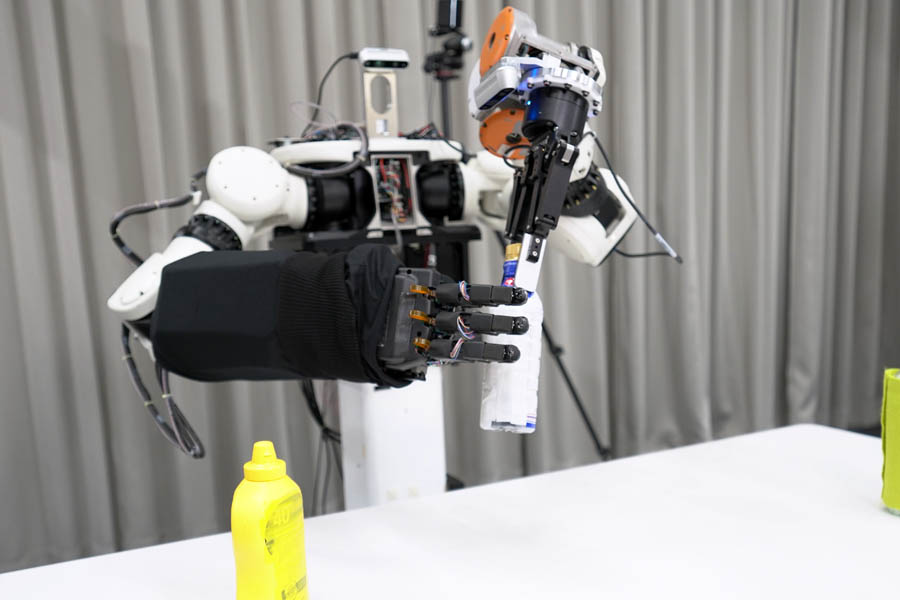
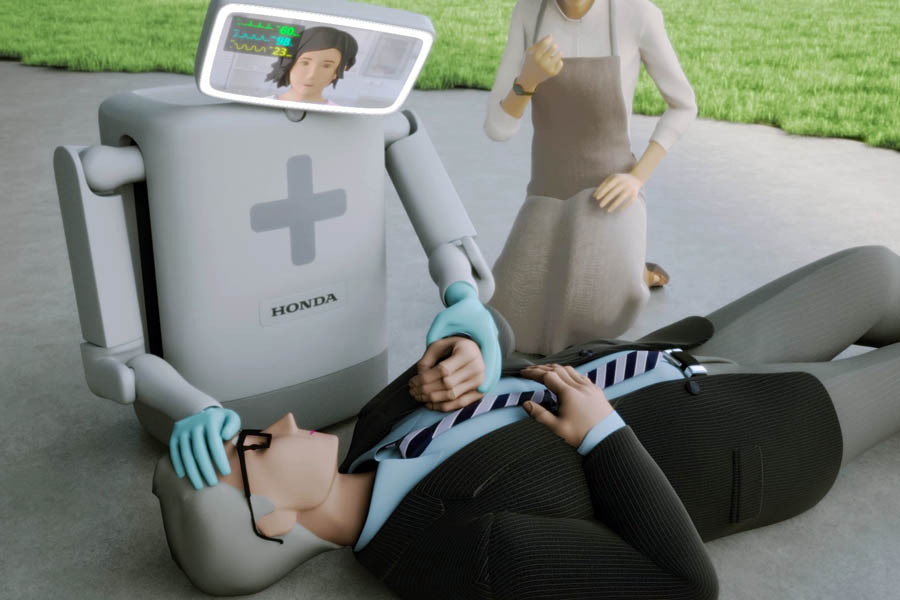
人の分身として動作するアバターロボットの最大のメリットは、リモートでありながら、あたかもその場にいるようにモノを扱えるなど、自身がその場にいなくても作業や体験ができることです。このアバターロボット実現の核となるのが、ロボティクス技術による多指ハンドと独自のAIサポート遠隔操縦機能です。
多指ハンドを通じて人のために作られた道具を使いこなし、AIのサポートにより、複雑な作業をより直感的な操作で早く正確に行えることを目指しています。
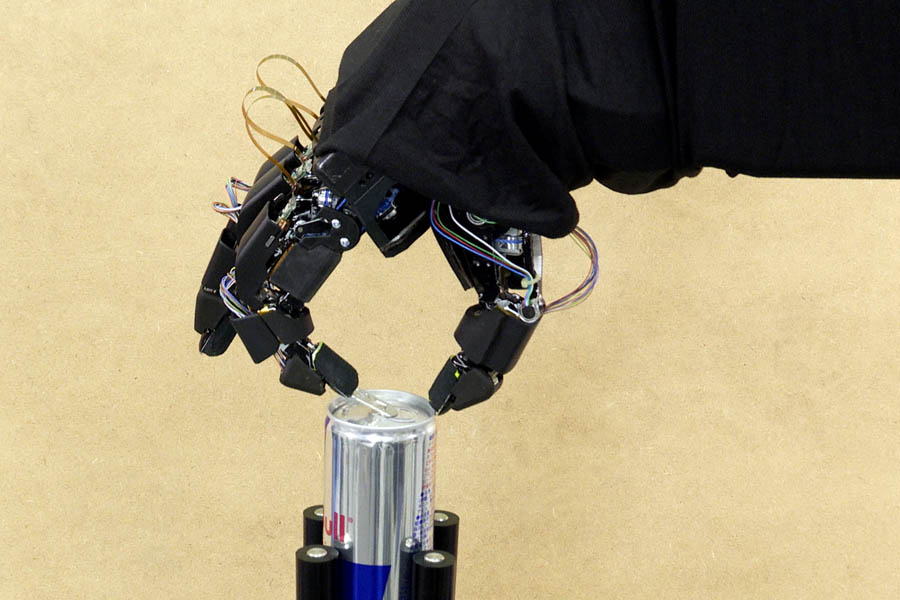
これまでのロボティクス研究を通じて長年の課題であった、小さなものをつまむなどの繊細さと、固い蓋を開けるなどの力強さを人間並みに両立できる手を多指ハンドとして実現。また、多指ハンドが一連の動作の中で物をスムーズに把持したり、細やかな力の制御で道具を操ったりできるように、ホンダ独自のAIサポート遠隔操縦機能の進化にも取り組んでいます。
現在は、ハードウェアの小型化とともに「把持する」、「操る」といった動作のさらなる精度の向上に取り組んでおり、2030年代の実用化を視野に2023年度中のホンダ アバターロボットの技術実証開始を目指しています。
宇宙への挑戦
ホンダは宇宙領域をコア技術を生かした夢と可能性への新たなチャレンジの場ととらえ、燃焼、誘導制御技術、燃料電池技術、ロボティクス技術といった独自のコア技術を生かし、宇宙という究極の環境で新たな価値の創造を目指して技術開発に取り組んでいることも発表しています。
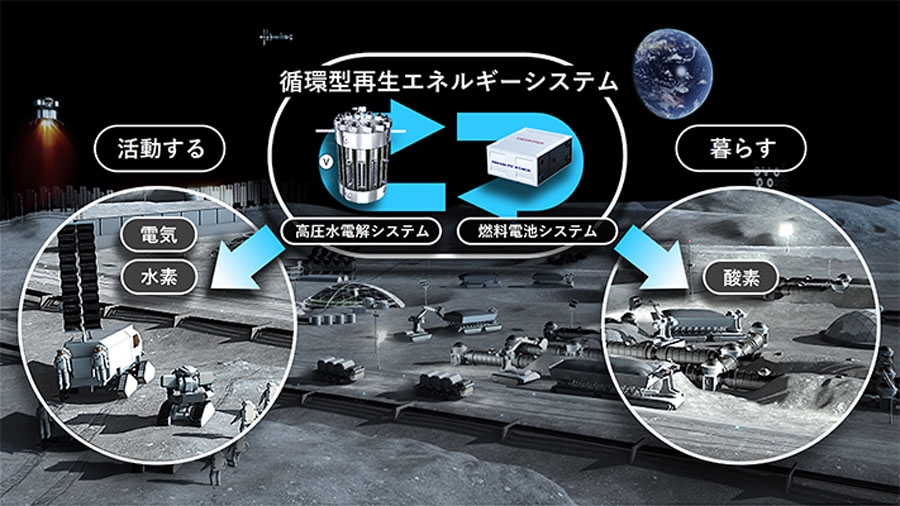
まず最初は月面での活動や開発の拡大を目指す取り組みです。月面には水が存在すると言われており、その利用によるさまざまな可能性が注目されています。ホンダはこれまで培ってきた燃料電池技術と高圧水電解技術を生かし月面での循環型再生エネルギーシステムの構築を目指し、国立研究開発法人宇宙航空研究開発機構(JAXA)と共同研究を行なっています。
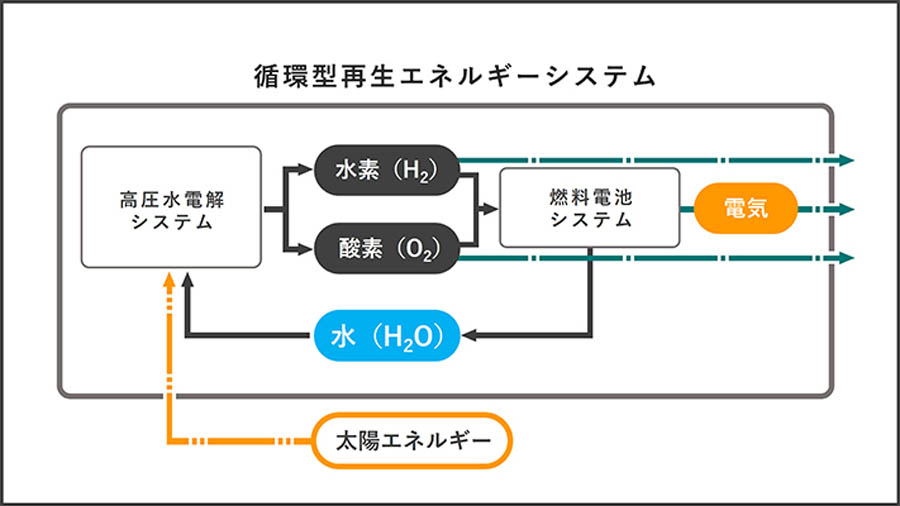
燃料電池技術と高圧水電解技術を組み合わせ、再生可能エネルギー由来の電力を使い、水を電気分解して水素・酸素として貯蔵し、その水素と酸素から燃料電池技術を用いて発電し、電力の供給が可能となります。
また、酸素は月面に滞在する人の居住用としても、水素はロケットの燃料としても、それぞれ活用可能であるなど、循環型再生エネルギーシステムの構築により、さまざまな有人活動への貢献を目指しています。
また、宇宙飛行士の危険を最小化したり、地球に居ながらにして、月に居るかのような体験を可能としたりする月面での遠隔操作ロボットにおいては、アバターロボットで開発中の多指ハンドや、AIサポート遠隔操縦機能、衝突軽減のための高応答トルク制御技術など、ホンダのコア技術の多くの応用が見込まれ、これらはJAXAの宇宙探査イノベーションハブにおける研究テーマとして採択され、2021年2月から共同研究を開始しています。
これ以外では、燃焼技術や制御技術などの技術を生かして小型ロケットを造りたい、という若手技術者の発案をきっかけに、小型ロケットの開発にも取り組んでいます。人工衛星は、温暖化や異常気象といった地球環境を観測したり、モビリティのコネクテッド化に有効な広域通信を可能としたりするなど、さまざまな用途に欠かせないものです。

その打ち上げ需要に対してロケットが不足している状況で、こうした課題を解決するために、低軌道向け小型人工衛星の打ち上げを目標として小型ロケットの開発を行なっているわけです。
また、自動運転技術の開発などを通じて培った制御・誘導技術を生かし、打ち上げ後にロケットの一部を着陸させ、再使用することも想定した研究も行なっています。
今回発表された未来に向けた先進技術開発は、当然ながらビジネスとして成立するかどうかは不明ですが、本田技術研究所がクルマというカテゴリーを超えた幅広い技術開発を行なっているということを社会的にアピールすることができたといえるでしょう。













