2014年10月24日、ホンダは11月に発表される次期型レジェンドが採用する先進安全運転支援システム「Honda SENSING」を発表したので、その詳細を見てみよう。
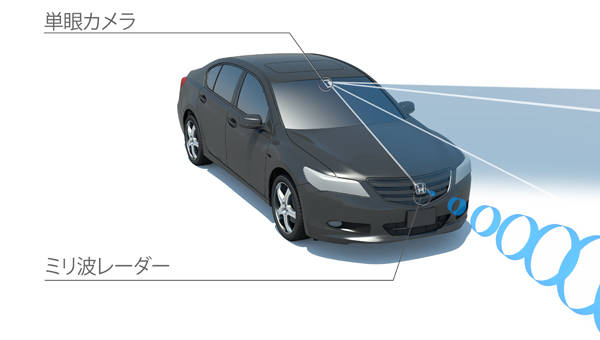
ホンダが採用するドライバー支援システムの中心となるセンサーは、単眼カメラと77GHzのミリ波レーダーの組み合わせて、現時点ではポピュラーな方式だ。車載用レーダーには現在、赤外線レーザーレーダーとミリ波レーダーの2種類があり、それぞれ特徴がある。赤外線レーザー式はコストが安いが、比較的短距離の検知で数10mの範囲での対応に限られる。一方のミリ波は周波数によって長距離から短距離に対応ができ、対象物までの距離、角度、相対速度を高精度に測定できる。がその分高価だ。



ホンダが採用するミリ波レーダーは長距離(おそらく200m程度)で対象物の検知が可能で、正確な距離が分かるため、高い速度にも対応が可能だ。また、単眼カラーカメラは歩行者を正確に認識できる性能を持っているという。そのため、統合的に処理し状況を的確に判断することで歩行者の存在を確実にし、また、自車線と路外の区別をより正確にできるようになったと説明している。
驚くことに、このミリ波レーダーと単眼カラーカメラのサプライヤーは別々であり、ホンダがその制御システムを作っているということだ。通常はレーダーとカメラからの情報を解析し、特に人間の動きの解析が難しく、そのアルゴリズムを作ることが難しいとされている。しかし、ホンダではミリ波レーダーを富士通テンから、単眼カラーカメラを日本電産エレシス(旧ホンダエレシス)製のものを採用している。
では、今回のホンダセンシングの機能を見てみよう。
1:歩行者検知機能付き、衝突軽減ブレーキ(CMBS)
2:歩行者事故軽減ステアリング
3:路外逸脱抑制機能
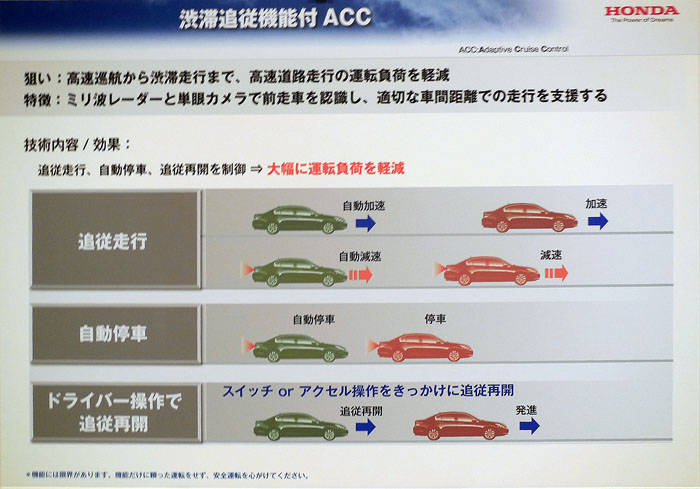
4:渋滞追従機能付きアダプティブクルーズコントロール
5:標識認識機能
6:先行車発進お知らせ機能
この6つが新たに加わった新機能で、もちろんこれに従来からの誤発進抑制機能、車線維持支援システム(LKAS)の機能もある。
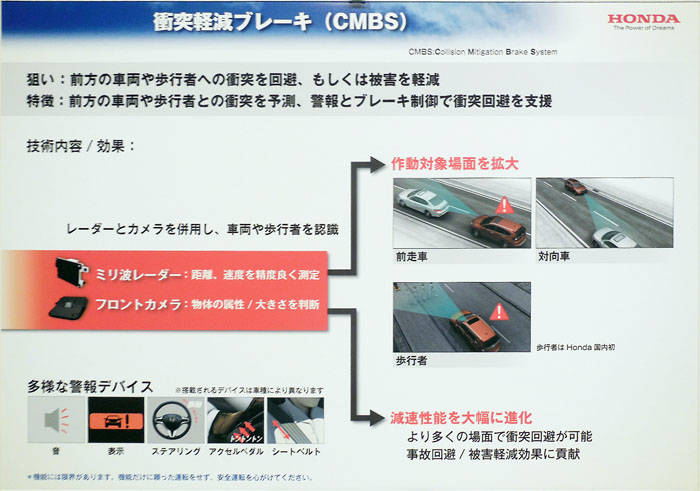
1のCMBSは前走車、対向車、歩行者を検出し、音と表示でドライバーに知らせる。さらに接近した時は軽いブレーキをかけて体感的に警告する。さらに接近したときは強いブレーキをかけ回避操作の支援をする。この機能では相対速度において作動速度に違いがあるものの、機能としては各社横並びの状況だが、軽いブレーキでより早いタイミングで警告を体感させるというのが新しいところだ。
また、対向車線にはみ出して対向車と衝突する恐れがある場合、音と表示に加えステアリングの振動で警告し、回避操作を促す。そこで回避行動が間に合わないときにはブレーキが作動して衝突速度を低減し被害の軽減を図る。

2は、世界初の技術で、単眼カラーカメラで走行車線を検知。車線からクルマが逸脱し歩行者との衝突が予測された場合、音と表示に加え、ステアリングを回避方向へ制御することでドライバーの回避操作を促すというものだ。ただし歩行者側の車線を逸脱して歩行者との衝突が予測される場合に働く機能なので、走行車線を認識していないケースではこの機能を期待するのは難しい。
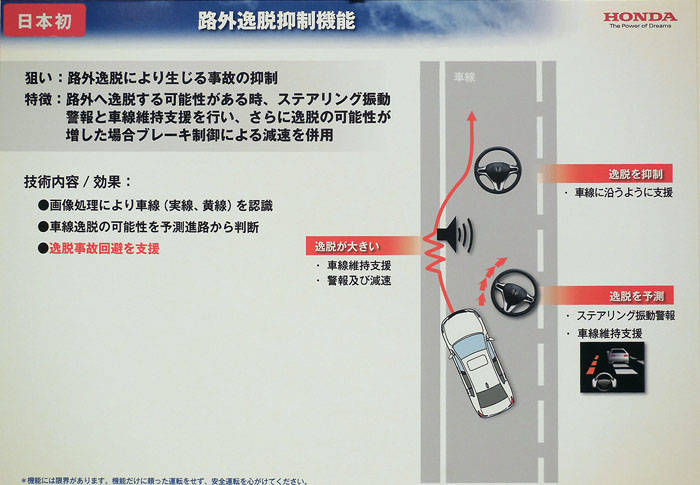
3も単眼カラーカメラで走行車線を検知し、逸脱しそうな場合はステアリング振動と表示で警告を行なうと共に、車線内へ戻るようにステアリングを操舵アシストする。逸脱量が大きいと予測された場合は、ブレーキ制御も加わり車線内に戻される。この機能は、アメリカやヨーロッパなど海外の郊外道路で、不注意により道路から逸脱して転落・転倒事故となるケースに対応したシステムだ。
4の渋滞追従機能ACC(アダプティブ・クルーズコントロール)は、ミリ波レーダーとカメラで前走車との車間距離と速度差を検知。アクセルやブレーキの制御を行なう。また作動範囲が全車速追従のため完全停止まで拡大しているので、渋滞時などは楽になる。

5の標識認識機能は、カラーカメラにより道路標識認を読み取り、ディスプレイなどに表示してくれる。「この道の制限速度は何km/hなんだろう」という経験は誰もがあると思うが、そうした状況では非常に役立つ。
6の先行車発進お知らせ機能は、先行車の発進を音と表示で知らせる機能だ。再スタートまでしてくれるともっといいのだが・・・

また、従来からも装備していたLKAS機能(車線維持システム)は、高速道路でのステアリング操作を支援し、逸脱しそうになると音と振動で警告する。ちなみに、この機能は65km/h以上で作動する。
これらの機能はいずれも完全自動運転への道程の途中と考えることもでき、あくまでも完全自動移動カプセルのための技術ではなく、ドライバーの運転操作軽減、あるいは支援といった姿勢からのアプローチであることは間違いない。現状ではホンダは、この単眼カラーカメラ+ミリ波レーダーのパッケージを、ドライバー支援システム、先進安全システムと位置付けている。
次に、次世代技術として全方位での安全技術についてみてみよう。
■ 自動運転とITSを融合した次世代の全方位安全技術
ホンダのさらにこの先の技術として、2014年の人とクルマのテクノロジー展でティア1であるフランスのヴァレオが展示していた、ミリ波やレーザーレーダーの次の世代のセンサーとして、レーザースキャナーを展示していた。こちらはミリ波レーダーやステレオカメラと比較し、検知距離で大きな違いはないというが、検知角度ではミリ波、ステレオカメラの40度前後の角度での検知に対し、スキャナーでは150度程度の範囲で検知できるという特徴がある。
スキャナーはGoogleの開発する自動運転車両で採用している(360度全周スキャナー)が、2017年あたりから市販車両への提供もあると説明していた。


▲デトロイトで開催されたITS世界会議で高速道路をデモ走行した自動運転試験車
もう一つの安全運転支援技術の発表は、まさに研究段階での技術であり、すぐに実用化されるものではないが、ここまで進んでいるという情報だ。2014年9月のデトロイト・ITSワールドコングレスで発表した内容が主な内容となっている。
発表の内容は2つの技術で前述のホンダセンシングによる安全運転支援技術と欧米標準の通信規格であるDSRC(双方向・狭域通信)を組み合わせた全方位安全技術、そして高速道路での自動運転技術になる。
ITS協調型の全方位安全技術
これは車両の自立制御、つまりドライバー支援技術に加えて通信技術のDSRCにより、自動車のみならずバイク、自転車、歩行者と相互通信し、それらを認識することで協調制御を行ない、安全を確保する技術である。言い換えればITSの車車間通信、歩車間通信(総称はV2X)コンセプトを融合させているのだ。

通信による他車との協調では、自車が歩行者と近づく状況、自転車に近づく状況、前走車の急ブレーキ操作、バイクに近づく状況、そしてドライバーが急病などで運転ができない状況のときに、他のクルマが誘導して病院へ搬送するケースなどがある。



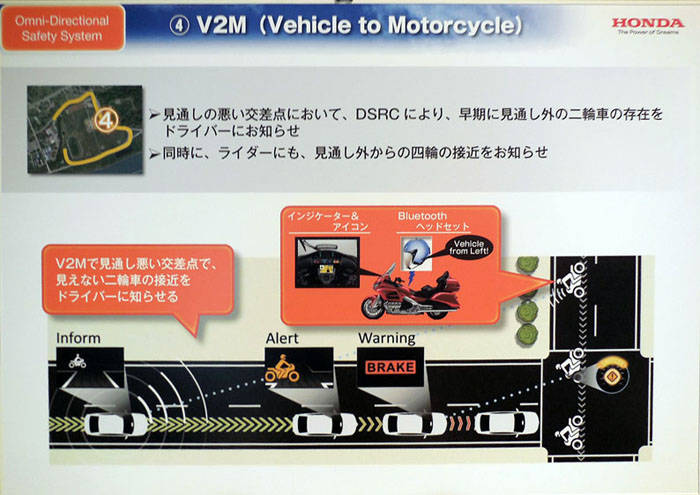

vehicle to pedestrian=V2Pと表記(クルマと歩行者という意味)。お互いに見えない状況でそれぞれにDSRC通信で情報を送り、危険であればブレーキが自動で作動し安全を確保する。そしてvehicle to motorcycle(V2M)は見通しの悪い交差点においてDSRCにより、お互いの存在を早期に知らせ安全を確保する。medical emergency assistはドライバーの心臓発作など運転が困難になった場合、緊急スイッチを押すと自動的にクルマが停止し、SOS信号を発信する。SOSを受信したほかのクルマが 停止したクルマを見つけ、病院などに誘導するというもの。

またデトロイトで開催されたITS世界会議では高速道路自動運転デモンストレーションを行ない、ハイウェイで一般のクルマが走っている状況の中で自動運転技術を披露した。
自律型では、道路工事など常に環境は変化するので、膨大なリアルタイムの情報処理と交通状況のセンシングが不可欠だ。そのために高精度の地図データと高精度の自車位置測定によりマッチングを取るためののシステムとして、ディファレンシャルGPSとGPS、それに高精度ジャイロ、中距離、長距離ミリ波レーダー、ステレオカメラ、2次元レンジファインダー、3次元レンジファインダーを装備している。
2次元レンジファインダーは前後左右に6個装備し、360度周辺の障害物位置、速度を検出する。3次元レンジファインダーは周辺車両の相対関係の算出をし、これらの機器からの情報を元に目的地まで安全、安心の自動運転をデモンストレーションした。状況としては高速道路においては車線変更、合流、車線維持、分岐など主に4つの状況を想定し、公道試乗を行なったということだ。













