
2014年9月5日、 ホンダは9月7日~11日までアメリカのデトロイトで開催されている「第21回ITS世界会議デトロイト2014」に出展した。自動運転のデモンストレーションとして、高速道路上での合流・分岐・車線変更などを最新の「コネクテッドカー技術(ネット接続型自動車技術)」と「自動運転技術」を行なう。これら先進技術の公開はアメリカでは初めてとなる。
デモンストレーションは、クルマと歩行者・自転車(V2P、V2B)、クルマとオートバイ(V2M)の通信技術を含む最新のV2X技術(自車と対象車や対象者が相互に通信で連携する技術)を紹介。その中にはホンダ初の技術として、運転中に運転継続が何らかの理由で困難になったドライバーのクルマを、別のクルマが無線でけん引していく「バーチャルけん引」も紹介するという。
今回の出展でホンダは、ITS技術の1つである専用近距離無線通信(DSRC)にフォーカスに当て、その活用法を提案している。
主なデモンストレーション内容
●高速道路自動運転
デトロイト市のダウンタウンに位置する8マイル(約12.8km)の環状高速道路を使用し、実際の交通環境におけるハンドル操作、自動ブレーキ、合流・分岐・車線変更など、高速道路自動運転のデモンストレーションを実施。
●クルマと歩行者/自転車間通信(V2P・V2B)
歩行者またはクルマのドライバーが所持するスマートフォン(独自新開発のV2P・V2Bアプリケーション搭載)とクルマとの間で、専用近距離無線通信技術(DSRC:Dedicated Short Range Communication)を活用し、ドライバーと歩行者または自転車に乗った人に衝突の危険を知らせたり、お互いのメッセージの交換を可能にしている。
●クルマとオートバイ間通信(V2M)
V2M技術はクルマとオートバイの双方が通信機を装備し、相互の通信により、衝突の危険をドライバーとライダーに知らせる。
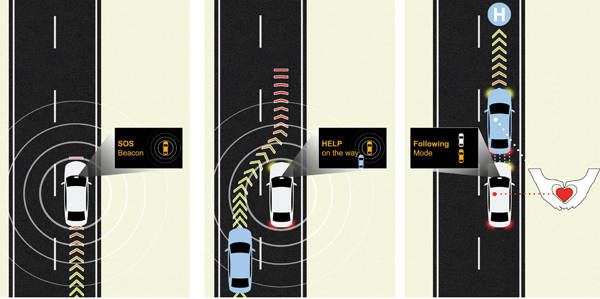
●V2V(車車間)による「バーチャルけん引」
ホンダ初の技術としてコネクティッドカー技術を用い、運転が困難になったドライバーを支援することを可能にする。支援を必要とするドライバーが周りの車両に支援を求めるメッセージを送り、支援に応じたドライバーがバーチャルに繋がることにより、けん引できるようにする。支援を求めた車両は、コネクテッドカー技術による先導する車両からのけん引指示と自動運転技術を活用し、病院などの緊急救援サービスを受けられる場所へけん引される。
●車線レベルのハザード情報+自動車線変更
コネクテッドカー技術およびクラウド技術の組み合わせにより、前方での事故等車線上のハザードを検知し、後続のドライバーにハザードの情報をライブ画像で通知。詳細情報を受けた車両は自動で車線変更が可能となり、止まることなくスムーズな運転が続けられる。
第21回ITS世界会議デトロイト2014 公式サイト
ホンダ公式サイト













