この記事は2017年1月に有料配信しているメルマガを無料公開したものです。
メルマガ登録はこちらから
最新ガソリンエンジンの基礎知識 その1
今回はエンジンの基礎知識を確認したい。総合トルク制御になって久しいが、理解が浸透しているわけではないからだ。CO2削減にとどまらず、新たな制御技術によってシャシー性能まで影響を及ぼすエンジン制御についてお伝えしたい。
■エンジンの発明
ガソリンエンジンは、オットーサイクルと呼ばれている。ドイツ語では今でもガソリンエンジンとは呼ばず、オットーエンジンと表現している。ドイツ人のニコラウス・アウグスト・オットーは1877年に、ゴットリープ・ダイムラーとヴィルヘルム・マイバッハらと共同研究の結果、4ストローク内燃エンジン「オットーサイクル」で特許を取得した。
この時点では燃料はガソリンではなく石炭ガスを使用したガス燃焼式エンジンだったが、下向きの吸気ストローク(石炭ガスと空気がピストン室に吸入)→上向き圧縮ストローク、(ピストンが混合気を圧縮)→下向き出力ストローク(混合気に点火器で着火・燃焼)→上向き排気ストローク(排ガスをピストン室から排出)という4ストローク・エンジンの基本原理を確立した。

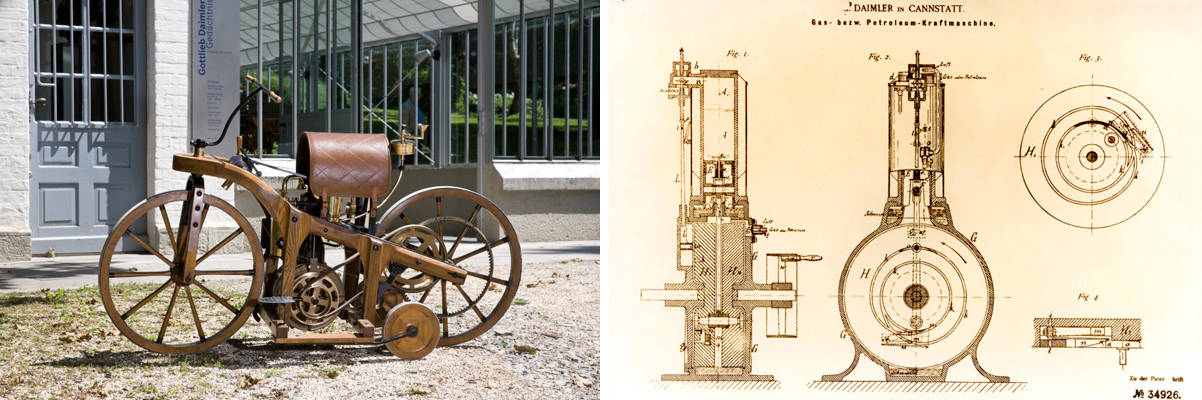
この4ストローク・エンジンに燃料としてガソリンを使用したのが、現在のガソリンエンジンだ。後に、ダイムラーとマイバッハは、実際にガソリンを使用するエンジンを作り上げている。
こうした4ストローク・ガソリンエンジンの基本はその後長らく使用されているが、現在では、排ガスの浄化と燃費、燃焼効率の向上、つまりCO2排出量を低減させることが大きな課題となっている。
■触媒と理想空燃比
排ガスを浄化させるための法規制として有名なのが、1963年にアメリカで制定された大気浄化法で、環境保護のために自動車の排ガス、フロン、二酸化硫黄などの排出を規制する法律で、その延長線上に1970年のマスキー法が登場した。自動車の排ガスに含まれるCO、HC、NOxを従来レベルの1/10まで下げるという大幅抑制が求められた。

当初はこの厳しい排ガスレベルの達成は不可能と考えられた。それに加えてアメリカでは1978年に企業平均燃費規制(CAFE)も登場し、ガソリンエンジンの未来はお先真っ暗に。しかしこれを救ったのが三元触媒と、フィードバック式燃料噴射と電子制御点火タイミングを総合的にコントロールするエンジン総合電子制御システムだった。

三元触媒を使用することでCO、HC、NOxを一挙に低減することができるのだ。ただしそのためには、ガソリンエンジンは理論空燃比=ストイキオメトリー(stoichiometry)で、つまりエンジンの燃焼室で吸気と燃料の混合比が理想となる14.7(ガソリン1gに対して空気14.7gを混合させた状態)にコントロールする必要があった。

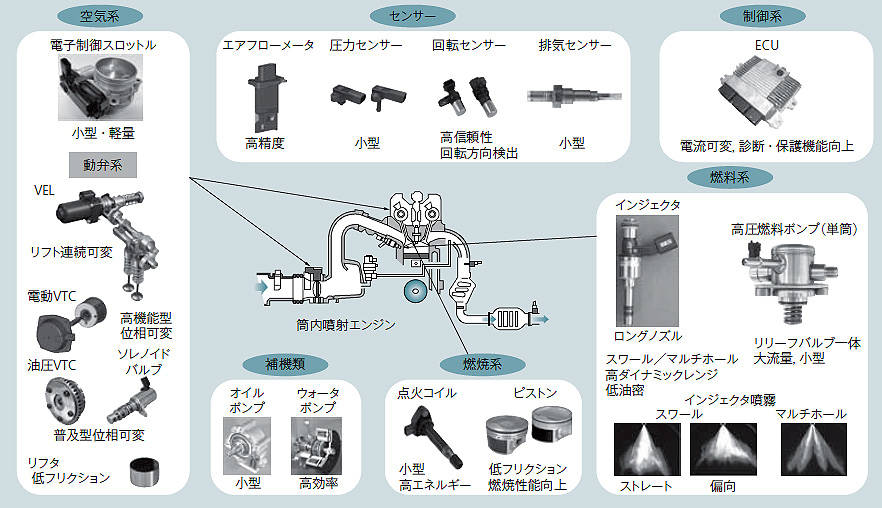
そのためエンジンには従来のキャブレターではなく燃料噴射装置が装備され、理論空燃比とするためには吸入空気を正確に計測するためにエアフローメーター(エアマスセンサー)も装備された。他には、エアフローメーターを使用せず、吸入空気圧とエンジン回転数から吸気量を演算するシステムシステムも存在する。
いずれにせよ吸気量を正確に計測し、その吸気量に見合ったガソリンを噴射して混合気を作り、燃焼させる必要があるのだ。さらに三元触媒が正常に働くために、三元触媒の部分にO2センサーを取り付け、理論空燃比で燃焼しているかどうかをモニターする。燃料が濃い場合は噴射量を減らし、薄い場合は噴射料を増すという信号がエンジン制御用のマイクロコンピューター(ECU)に送られるという、フィードバック制御が取り入れられている。

エンジンを制御するためのプログラムとして、燃料噴射や点火時期をその時の運転状態に合わせて最適に制御するマップは、ECU内部に格納された内蔵メモリー(ROM)に記録されている。エンジンの制御はより高速化、高精度化され、結果的にCPU(中央演算装置)も高速化されている。当初は8ビットだったものが、現在では32ビット・マイコンにまで変化している。またCPU自体も、ROM、RAMを一体化したCPUに進化している。

■総合トルク制御へと変化
現在のエンジン制御はATトランスミッションの制御、エアコン制御などと連携し、データを共有する必要があり、現在は車内に搭載されている多数のECUは車内のLANであるCAN(Controller Area Network)BUSで結合され、必要なデータを共有している。
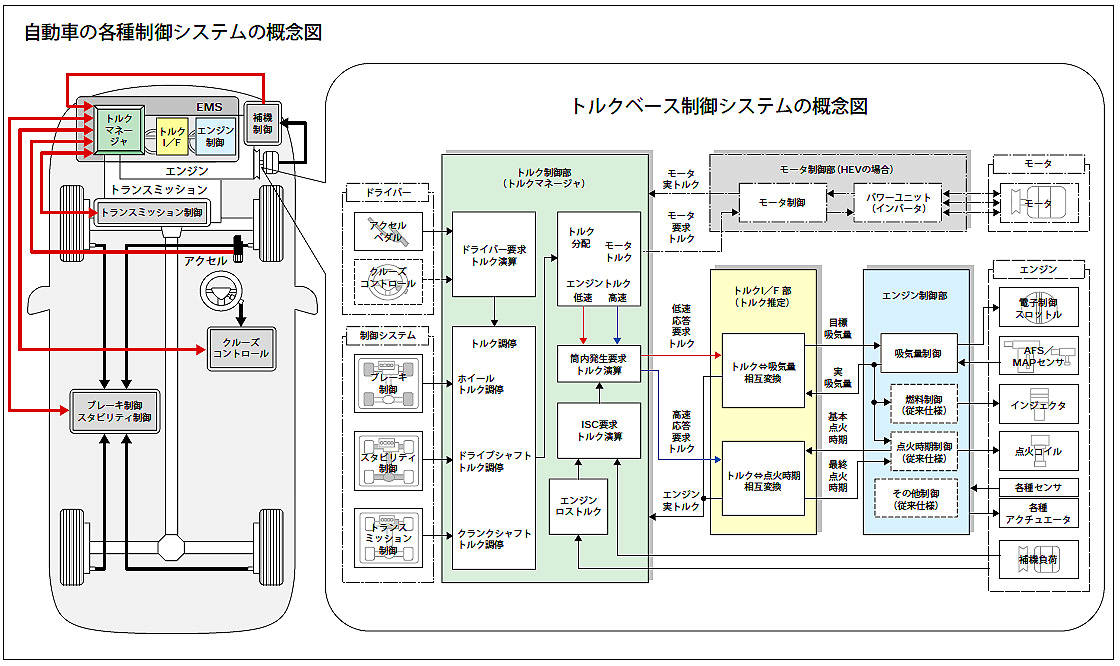
例えば、ATの変速の場合、エンジンのトルクを一瞬だけ低下させて変速ショックを抑えるという、エンジン~トランスミッション協調制御が行なわれる。また現在ではESP(横滑り防止システム)も装備され、ESPが作動するような状況では4輪ブレーキの独立自動制御とエンジンのトルク抑制制御が同時に作動するような状況も発生する。またトラクション制御もタイヤの空転に合わせ、エンジントルクを抑制する制御が作動する。
このようにシャシー、トランスミッションの制御とエンジンの出力、トルクの制御は密接に連携しているが、それらを個々にプログラム要素として各ECUに盛り込むことになると、制御プログラムは複雑化する一方になる。
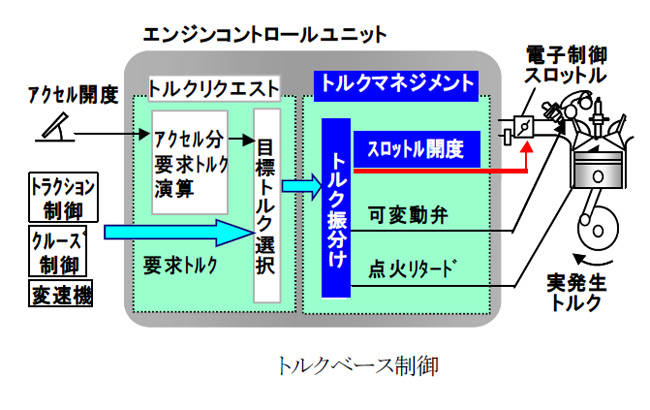
こうした状況をブレークスルーするために、エンジン制御の制御ロジックとして採用されたのが「総合トルク制御」あるいは「トルクベース制御」という理論だ。どちらも同じ意味でこれは、エンジンの出力を吸気量の計測から決定するのではなく、走行中の駆動タイヤに求められる駆動力から逆算してエンジンの出力、トルクを決定するシステムだ。
その時に求められるエンジントルクは「ターゲット・トルク」、あるいは「リクエスト・トルク」と呼ばれる。
エンジンのトルクを決定するためには、電子制御スロットル、点火タイミングはもちろん、動弁系例えば、可変バルブタイミング機構、可変バルブリフト機構などの採用や、過給圧制御などが使用される。
一方で各センサーからの情報をもとに、ドライバーの加減速の意思、タイヤのスリップ具合(路面状態の判定)、トラクション制御の動き、クルーズコントロールの有無、変速ショックの低減要求などを総合的に演算して「ターゲット・トルク」を決定している。
これらのデータはROMに記録されたトルクマネジメント・プログラムにより、スロットルや点火時期など各アクチュエーターの指令値を演算する。
こうした総合トルク制御は、以前のように流入する空気量で出力を決めるのではなく、車両のさまざまな状況から、必要な出力、トルクを算出し決定する方法に変化しているわけだ。従って、かつてのエンジンのように、吸入効率のよい、エアクリーナーに交換し空気量を多く取り入れたとしても、イコールパワーアップというエンジンではなくなっているのだ。(音が良くなり速くなった気はするが・・・)
ちなみに、ROMの変更には制御プロセスを遡り、かつてはC言語で書かれた仕様書を変更する必要がある。現代での制御プログラムはC言語ではなく「モデル」が使用されている。従って、モデルを入手、解析は開発メーカー以外ではあり得ないといういわけだ。
こうした総合トルク制御という発想により各コンポーネンツの協調制御系の最適化、ECUを含む各種制御システムの簡素化や標準化が実現し、さらに内燃エンジンと電気モーターという2種類の動力源を持つハイブリッド・システムも実現可能になったといえる。
この総合トルク制御システムは、2000年前後にボッシュが採用し、2000年代以降に日本車にも採用されるようになっている。













