
ジャガー・ランドローバーは、世界初のオフロードのデモンストレーションとして、2台の「RANGE ROVER SPORT」を使った、革新的な専用狭域通信技術(DSRC:Dedicated Short Range Communications)で接続する「OFF-ROAD CONNECTED CONVOY(オフロード・コネクテッド・コンボイ)」を行なった。
この無線車両間(V2V:vehicle-to-vehicle)通信システムは、車両位置、空転、サスペンションの高さやホイール・アーティキュレーションといった情報に加えて、オールテレイン・プログレス・コントロール・システム(ATPC)とテレイン・レスポンス設定を、2台の車両間で瞬時に共有できるもので、現実世界のあらゆるオンロードやオフロード環境、天候条件においても車両が自動的に走行可能となることを目指したものだ。
これまでに数百万ポンド(約数億円)規模の予算を投じた「AUTONOMOUS ALL-TERRAIN DRIVING(オールテレイン自律運転)」研究プロジェクトは、現実世界のあらゆるオンロードやオフロード環境、天候条件においても車両が自動的に走行可能となることを目指している。

「当社のオールテレイン自律運転に関する研究は、高速道路や極めて険しいオフロード環境で、車両が自動で走行できるようになるだけにとどまりません。ドライバー による運転と自律運転の両方が、あらゆる地形や条件においても安全に走行できるようにサポートすることが重要と考えています。高度な自律運転技術や完全自動運転技術の適用を舗装路のみに限定するのではなく、ドライバーが脇道に入ったとしても、継続的にサポートしていきたいと考えています。もしドライバーが前方の障害物や危険にどのように対処すればよいかわからない場合でも、車両に制御させることが可能になります。当社はすでにオールテレイン技術において、世界をリードしています。これらの研究プロジェクトにより、当社のリードは今後もさらに進むでしょう」とジャガー・ランドローバーの研究主任、トニー・ハーパー氏は述べている。
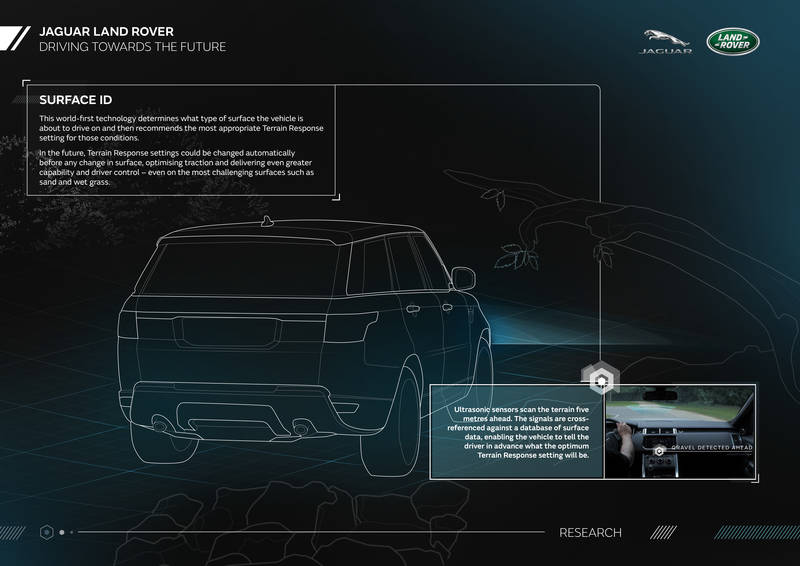
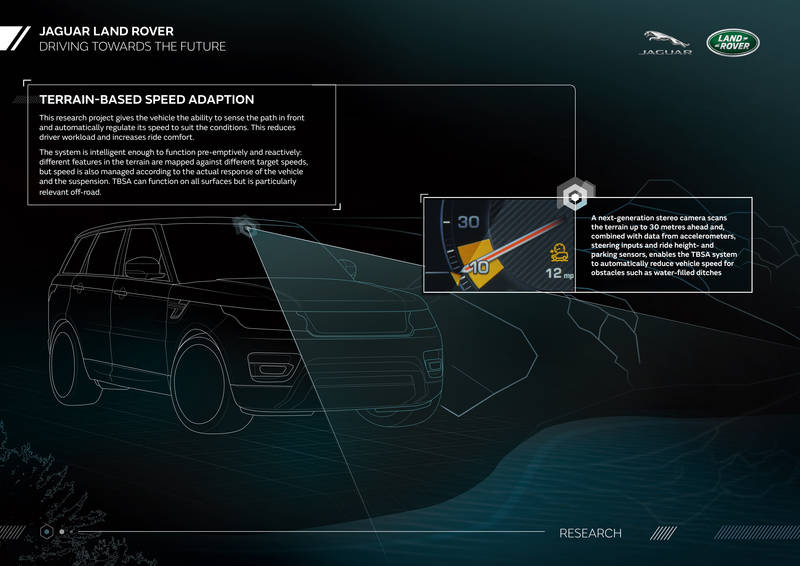
この構想に沿ったオールテレイン自律運転能力を実現するため、ジャガー・ランドローバーではカメラ、超音波、レーダーおよびLIDAR(ライダー)センサーを組み合わせ、車両に360度の視界を提供する「路面識別および3D道路センシング」や、進行方向に進路から突き出た枝や駐車場の高さ制限バーといった障害物が何もないことを、ステレオカメラ技術を活用して前方をスキャンすることで識別する「OVERHEAD CLEARANCE ASSIST(オーバーヘッド・クリアランス・アシスト)」、カメラを使用して平坦でない路面や起伏のある路面、波状の道路、くぼみ、溜り水なども検知し、車両の乗り心地にこれらの路面が与える影響を予測し、自動的に速度を調整することで、乗員の快適性を確保する「TERRAIN-BASED SPEED ADAPTION(TBSA:テレインベース速度調整)」などの研究を続けている。
「将来、自律運転車両はこ の情報を共有することで設定を自動調整したり、障害物に対処するようルート変更したりできるようになります。サファリでは、先頭車両が後続車両に、どこで減速し、停車すべきかを指示し、乗員が最高の写真を撮影できるようにもなるでしょう。」とトニー・ハーパー氏は説明している。













