この記事は2019年11月に有料配信したものを無料公開したものです。
前回は、これまでの自動車業界には存在しなかった新しい自動車用語の、前回は「MaaS」という言葉について考察した。今回は、トヨタの豊田章男社長がよく口にする「100年に一度の大変革」と同じ意味で多用される「CASE」について考えてみよう。
CASEの意味
「CASE」とは、Connected:コネクテッド(インターネット常時接続)、Autonomous:オートノーマス(自動運転化)、Shared&Services:シェアード&サービス(カーシェアや移動サービス)、Electric(電動化)の頭文字をつなぎ合わせた造語で、今後の自動車産業が進む方向性を意味している。
この「CASE」という言葉は、2016年秋に開催されたパリ・モーターショーで、ダイムラー社のディエター・チェッチェ元CEO(現・監査取締役会会長)が、今後同社が取り組む中長期戦略のテーマとして使用したのが最初である。いわばメルセデス・ベンツが採用する戦略を説明するための造語なのだが、それ以後は他の自動車メーカーでも、サプライヤーなど自動車業界全体でも、近未来の事業戦略を語るための常套句となっているのだ。
CASEは、インターネット接続とそのコンテンツの拡大、自動運転化技術、カーシェアなどのモビリティ・サービス、そして電動化の頭文字を並べただけだが、真の意味はそれら4種類の新しい技術に脚光を当てたということではなく、自動車メーカーとしてはこれらを同時に推進する必要があるということだ。
テレマティクス
コネクテッドとは、インターネット接続により情報を相互通信するといった意味で、インターネットと通信できる車載機器を搭載したクルマは「コネクテッドカー」と呼ばれる。
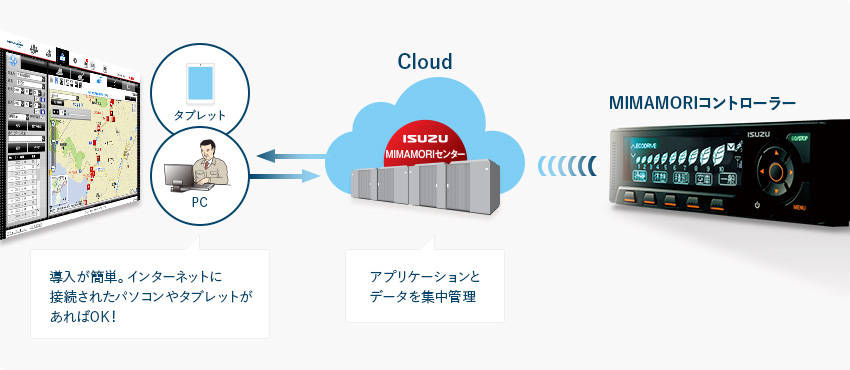
従来から自動車メーカー、ディーラー、個人のクルマを通信で接続する「テレマティクス」というコンセプトが存在していた。2004年頃にはいすずが輸送トラック向けに「みまもりくん」を開発し、走行するトラック、運輸会社、荷主を通信で連結し、走行しているトラックのエンジン情報、荷物の到着予定時刻などを共有することができた。
乗用車の分野では、ヨーロッパ車が積極的に取り組み、BMWはいち早くテレマティクス・サービスを取り入れた。メーカー、ディーラー、オーナー車が通信し、オーナー車の故障情報をいち早くディーラーに送信する。ディーラーは定期メンテナンス時期をオーナー車に送信する。ディーラーで判断の難しい故障の場合は、ディーラーの診断機を経由してBMW本社の品質管理部門に情報を送信し、本社側で対策データを診断機に返信するといったシステムとしていた。
こうしたテレマティクス・サービスはヨーロッパでは急速に拡大し、オーナー車の所在位置を、自動車メーカーが把握できるまでになっていった。これはヨーロッパ諸国は地続きのため、盗難車が遥か離れた国に移動するといった現実に対応するためだ。
e-callの義務化
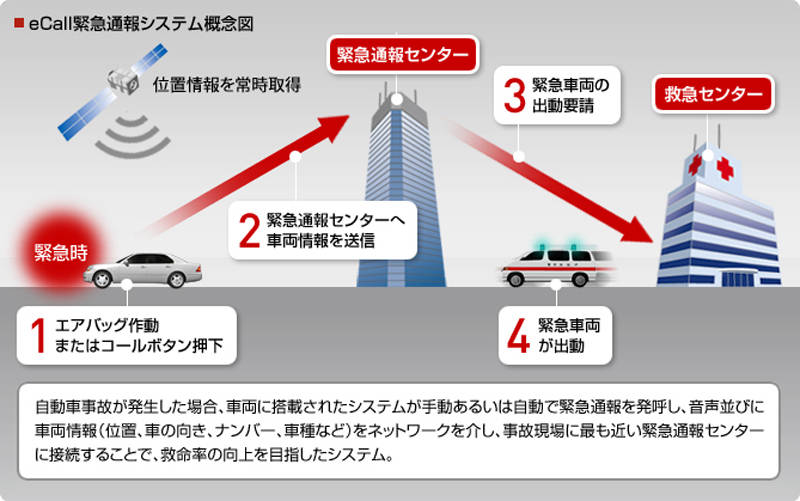
また、ヨーロッパで採用が義務化された「e-Call(イーコール)」もテレマティクス・サービスの一つだ。欧州委員会(EU)のプロジェクトで、自動車事故発生時には、車載の通信ユニットが、エアバッグ・衝突センサー情報、発生位置(GPS座標)を電話用回線を使用してセンターへ自動的に送信するシステムで、センターからの要請で救急車、ドクターヘリなどが現場に駆けつけるというシステムだ。
ヨーロッパ、ロシアでは都市部以外では警察署も消防署も存在せず、クルマの通行もほとんどない地域も珍しくはないので、事故に遭遇した人の命を守るためのシステムとして採用され、最終的に2018年からヨーロッパで販売される新車に採用が義務付けられている。残念ながら、テレマティクス・サービスは日本では本格的に定着せず、結果的にコネクテッドカーの開発も遅れているのが現状だ。
スマートフォンとの接続
本格的なコネクテッドカーは、3G、4Gのモバイル通信用の通信機を搭載し、自動車メーカーのサーバーと接続され、自動車メーカーのサーバーは各種のビッグデータを蓄積したクラウドと接続することで、クルマは様々な情報サービスを受け取ることができる。
この分野でも日本は立ち遅れた。ただし、アメリカやヨーロッパで販売するクルマはいち早く対応しており、いわはダブルスタンダード状態となっている。
コスト的に通信機を搭載することが難しいクラスのクルマは、スマートフォンとクルマを接続することで、事実上のコネクテッドカーとすることができる。

コネクテッドカーが重要な点は、カーナビゲーションがクラウドからの多様な情報を受け取ることができ、従来のような車載単独のカーナビを遥かに超える正確性やリアルタイムの交通情報、事故渋滞、天候情報などの取得が可能になる。
もちろん、音楽やメール、SNSなどの送受信も可能になり、エンターテイメントの世界も格段に幅を広げることができる。
コネクテッド(CASEのC。インターネット常時接続)
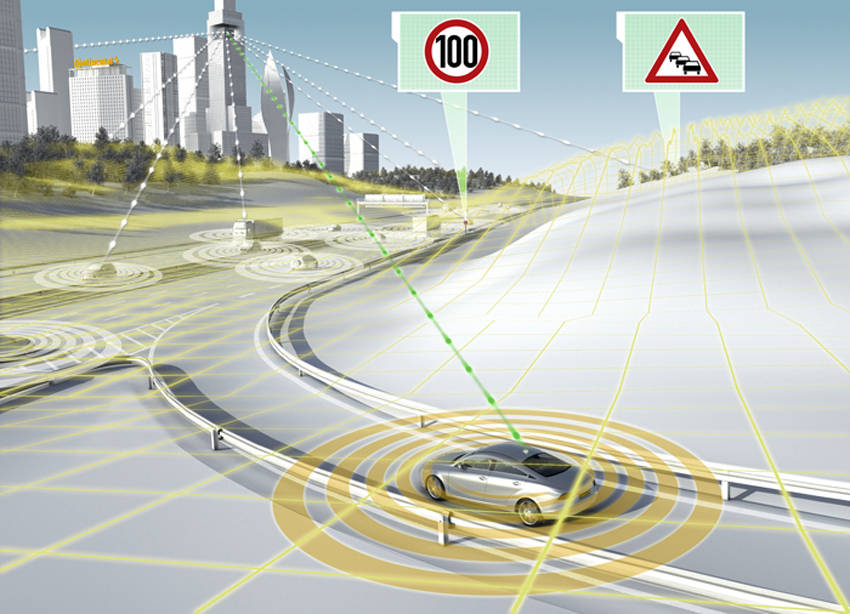
しかし、現在では常時通信と高精度3次元マップを搭載した車載カーナビを組み合わせることで、高度運転支援システムや、自動運転の精度も格段に高めることができるという点が注目されている。高精度マップによる高精度な位置情報と運転支援システムや自動運転システムが連携することで、車載センサーだけでは不可能な情報が取得できるようになる。
つまり、カメラやレーダーでは把握できない、はるか先の交通情報を先読みでき、高精度マップにより視界の先にあるカーブや道路形状をいち早く認識することができるのだ。
今後は、高精度3次元マップにクラウドから送られるリアルタイムの天候情報や交通情報を重ね合わせたダイナミック3次元マップの情報を生かし、より高度な運転支援や自動運転が可能になるだろう。
逆に言えば、レベル3以上の自動運転は、こうした通信による情報なしには成立しないという認識が定着しつつある。
また通信によりクルマのソフトウェアの自動更新も可能になり、同時に自動車メーカーは走行する多数のクルマの車両データも取得することができる。
テスラはいち早くこのシステムを採用し、自車の走行データや使用状況をクラウドに蓄積し、今後の車両開発の参考データとして利用している。

走行する車両同士の通信も今後の大きなテーマだ。車両同士の通信はV2V(車車間の直接通信)と、車両とクラウド、クラウドと他の車両が通信するクラウド経由の通信が存在するが、例えば前走車が急ブレーキを踏む瞬間の情報が後続車に伝達されれば、カメラによる情報より遥かに早く対処ができ、事故のリスクを低減することができるなど、運転支援としてきわめて有効なのである。
自動運転技術(CASEのA)
これはもう今さらともいえる用語だ。ただし、すべての自動車メーカーが自動運転の実現を目指しているわけではない。例えば、日本のメーカーではスバル、マツダは高度運転支援システムは目指すが、自動運転をゴールとはしていない。
一方で、日産やトヨタは自動運転に向けての技術開発に力を入れているなど、メーカーごとに温度差があるのも事実だ。

ただ、基本的に自動運転技術が向かう方向が2つ混在していることは知っておくべきだろう。最も重要なことは、自動運転技術が普及することで交通事故の発生を防ぎ、死亡事故ゼロを目指すという大目標があるということだ。数なくともこの点では自動車メーカーの目指す方向は一致しているはずである。
ところが現在の自動運転技術の起源を見ると、またひとつ別の方向性がある。現在のような自動運転技術の出発点は、2004年にアメリカの国防省の研究部署である国防高等研究計画局(DARPA)が主催した賞金をかけたレース「グランドチャレンジ」だ。

「グランドチャレンジ」は、モハーベ砂漠の指定コースを無人運転のクルマでゴールできれば100万ドルの賞金が与えられるというプロジェクトで、選りすぐりの大学の研究室や企業が参加した。この年(2004年)は完走できたクルマはいなかったが、2005年のレースでは212kmのコースを5台が完走し、スタンフォード大学チームのフォルクスワーゲン・トゥアレグが優勝した。

このレースの意味は、完全自律走行の車両により荒れた砂漠のコースを走破するというもので、自律走行とは各種のセンサー類、GPS信号などを利用しその車両のAIコンピューターが走行コースを判断して走行するということを意味する。
このプロジェクトの終了後、企画チーム、大学の研究チームにいた人達がIT業界に散らばり、それらメンバーが結集して2007年にGogleが自動運転車の開発を決定し、そして2010年に実現させている。これが無人の自動運転を目指すGoogleカーの誕生である。Googleカーは後に分社化し、現在はウェイモ(WAYMO)となっている。
このGoogleカーこそが既存の自動車メーカーに多大な影響を与え、自動運転開発の競争が開始されたのだ。自動車メーカー発ではなくIT企業が自動運転技術の開発に取り組んだことが世界のトレンドを変え、既存の自動車メーカーが衝撃を受けたのも事実である。

CASEのS(サービス)
もちろんGoogleが自動車メーカーを目指したわけではなく、無人の自動運転車のカーシェア、タクシー、運転免許を持たない人々への移動サービスの提供など、現在でいう、モビリティ・サービス、シェアリングを想定した。結果的にこうした発想は多くの自動車メーカーにも影響を与え、MaaSという概念が定着することになった。
広い意味でいえば、先進国の市場ではもはやクルマの販売成長は期待できず、せいぜい買い替え需要しか望めない。そうした市場で、特に交通事故の多発する巨大都市圏ではシェアリング、無人運転のバス移動のほうが合理的だという考え方が定着しつつあるのだ。
ただ、Googleカーには1台あたり1500万円以上の高価なセンサー類が搭載されており、実証実験車としては受け入れられても、量産車向けとして成立しない。こうした問題をブレークスルーするのが既存のレーダーやカメラ類と高精度3次元マップ、インターネット通信によるクラウド情報とのやり取りというシステムであり、これらを統合するシステムの完成によって初めて自動運転の普及の道が開かれる。だが、そのためには各種のクラウド、官庁の交通情報クラウドの運用、交差点や交通システムのインフラ整備など、社会的なバックアップも不可欠である。
また一方で、自動運転技術に関してはグローバルで地域的な温度差が大きいことも課題になっている。ヨーロッパ圏では依然として手放し(ハンズオフ)運転、自動運転は容易には認められる方向にはなく、ヨーロッパのユーザー意識調査でも自動運転に対しては否定的だ。アメリカでも一般のユーザー層は自動運転に対する評価、関心は高くない。
その一方で、運転環境が劣る日本や中国ではユーザー層が自動運転に対して関心が高いという調査結果になっている。当然ながら、こうした地域ごとのバックグラウンドの違いにより、自動運転車の普及には大きな差があることも考えられる。
さらに、現実的な社会的な課題としては、自動運転車が普及するにはかなり長い時間を必要とし、その期間は人間の運転するクルマと自動運転車が道路上で共存せざるを得ない。その時に、ドライバーが自動運転車に対してどのような反応をし、どう行動するのか、という課題、専門用語でいえば「自動運転車の社会的な受容性」が存在する。
こうした状況下で、果たしてスムーズな交通が実現するのか、大渋滞を巻き起こすのか、予測は不可能といわざるをえない。













