グローバルサプライヤーのヴァレオは、11月16日、自動運転と自動駐車のためのコンピュータービジョンの研究をより高いレベルに引き上げることを目指し、サラウンドビュー魚眼カメラを採用したオープンソース データセットの「WoodScape」を公開した。

ヴァレオ コンフォート&ドライビングアシスタンス ビジネスグループ プレジデントのマルク・ヴレコーは、「ヴァレオは低速と高速の自動運転シナリオに対応する魚眼カメラ用のコンピュータービジョン アルゴリズムの開発を推進するために、ウッドスケープ(WoodScape)を公表してさらなる開発を推進したいと思っています」と語っている。
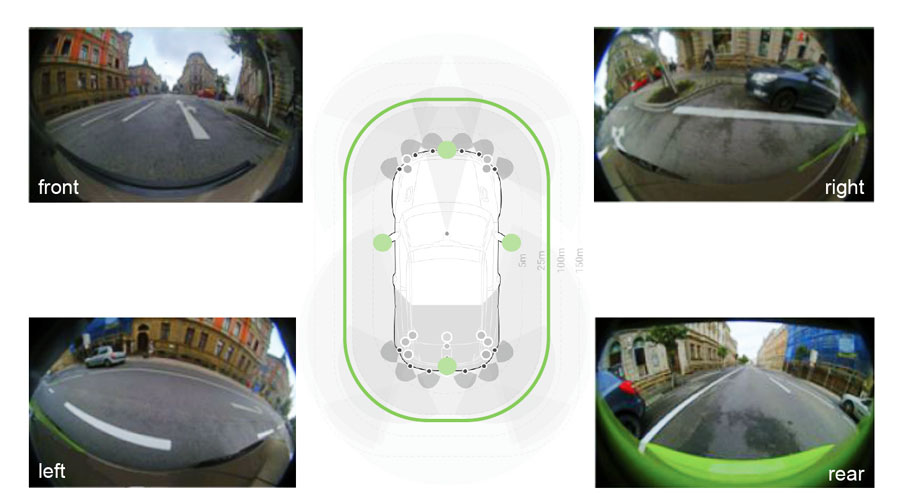
WoodScapeは、ヨーロッパ中を走行した多数のヴァレオ社の車両によって撮影された1万を超える画像で構成されている。ヴァレオの車両には4基の自動車用サラウンドビュー魚眼カメラを搭載し、画像の認知処理、深度推定、2Dオブジェクト検出、対象物の位置推定、動体検出、カメラ汚れ検知など、さまざまなタスクのための機械学習システムを使用している。
従来の狭視野カメラからのデータセットでは利用できるものがあるものの、広範なマルチタスク サラウンドビュー魚眼カメラデータセットに比べると遥かに情報量は少ない。また従来のカメラをベースとしたデータセットは、3つまたは4つのタスクに限られているのだ。
自動運転の研究における最も大きな課題のひとつは、センサーシステムにより車両の周囲の物体を分類でき、完全にラベル付けされ、人間が注釈を付けた十分な関連データを取得することが必要で、ヴァレオのWoodScapeはこの課題への対応が可能なのだ。
ヴァレオは、超音波センサー、レーダー、カメラに加え、業界初で唯一の量産されている車載規格のLiDARを含む自動車業界で最も幅広いセンサー群をラインアップしている。そして、自動運転システムにより有効な360度の検知を可能にする多機能魚眼カメラも生産している。
この多機能な魚眼カメラは車両に4基装備することで360度の物体検知が可能であり、より少ないセンサーでより高精度な先進運転支援システムや自動運転を実現できるポテンシャルを持っているといえる。













