自動運転とコネクテッドカーのリーダー企業のひとつであるヴァレオと、高精度3次元地図データ(HDマップ)のプロバイダーである「ダイナミックマップ基盤」は2021年2月25日、正確な自車位置推定とHDマップ更新のためのテクノロジーとビジネスモデルを共同で開発することで合意しました。
車両が周辺環境を認識し、自車位置を正確に特定することは、ADAS(先進運転支援システム)と自動運転車の開発における主要課題の一つであることはよく知られています。また、インフラや道路環境変化に対応する上で、自動運転車が使用するHDマップの定期更新も、リソースと時間を要する課題となっています。
自動車メーカー全社やサプライヤーが支えるダイナミックマップ基盤は、自動運転の実現に必要なHDマップと高精度3次元点群データ(ポイントクラウドデータ)を提供しています。
両社は、ADASや自動運転の品質向上に必要な高精度な自車位置推定技術と、地図更新技術につき、非独占的にグローバルに共同でサービスを提供することを目的に、技術・事業両面の検討を行なうことに合意したものです。

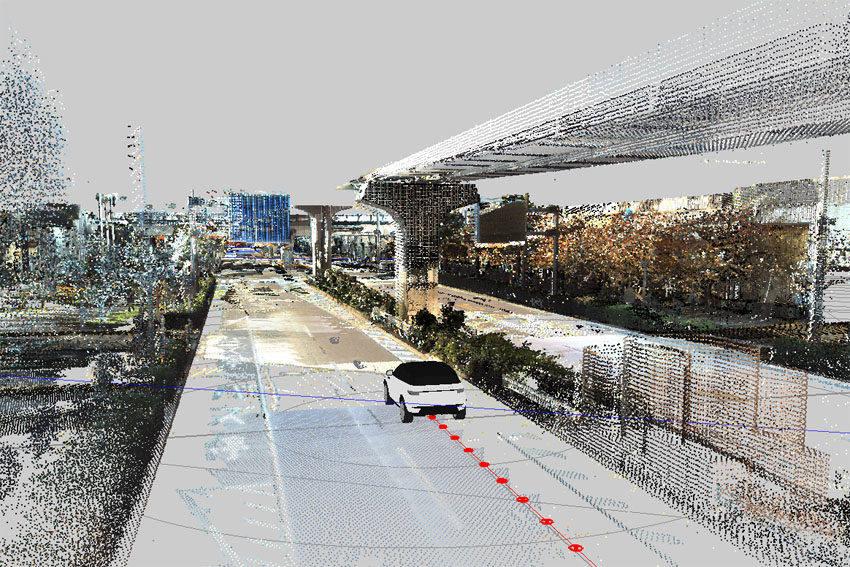
一方、ヴァレオはADASと自動運転システム向けのセンサーとシステムを開発しています。これには標準のGNSS(GPSデータ)と唯一の自動車用規格のLiDAR「ヴァレオ スカラ」とポイントクラウドマップのみを使用した、高精度のローカリゼーションとマッピングシステム「ヴァレオ ドライブ4Uロケート」が含まれます。このシステムは、市街地でcmレベルの精度での自車位置推定が提供可能なシステムです。

高精度3次元地図データと、LiDARや高精度な自車位置推定技術をより洗練された技術で融合させることができれば、今後のADAS、自動運転技術はより加速すると考えられます。













