クルマはスマホのようになる、そう話を聞いたことがあるという人もいるだろう。クルマの中で検索ができ、エンタメがあり、といったスマホのアプリでできるようなことが車内でも可能になるという意味だ。
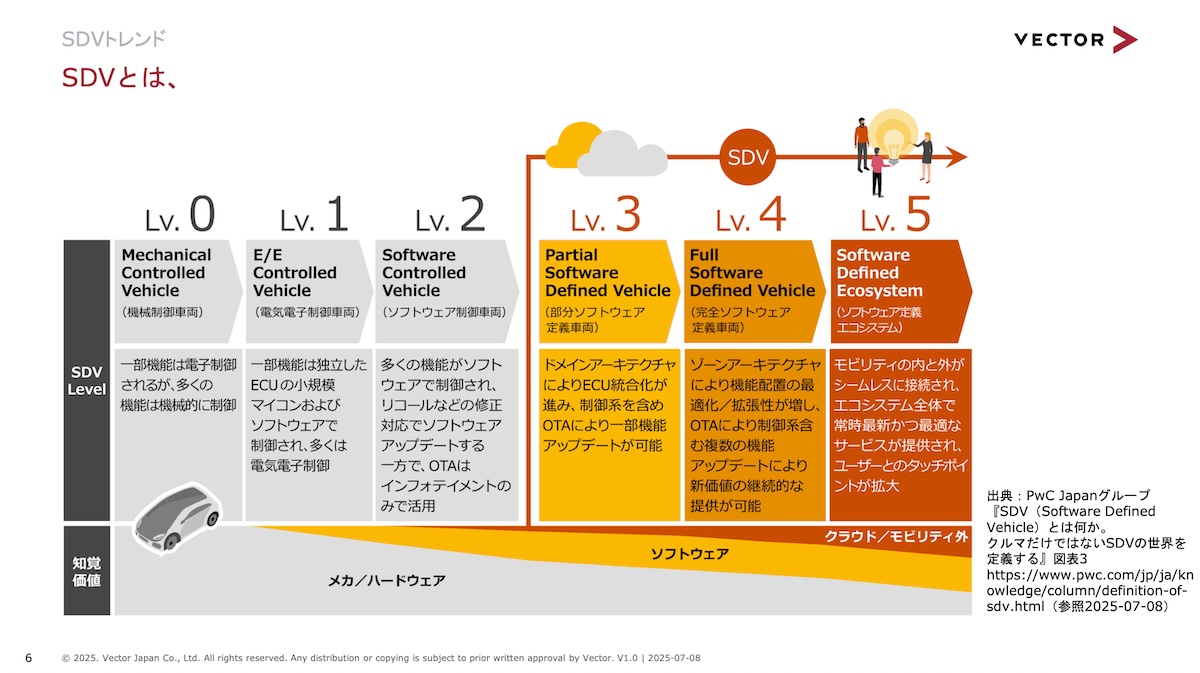
そうしたモビリティの変化はEV化や自動運転と並行して行なわれており、その背景にSDVがある。Software Defined Vehicleの略で、すべての機器の動作はソフトウェアでコントロールされるという意味だ。例えば、ハンドルを切る動作は電動パワーステアリングが行なうが、EPSはモーターで動いており、そのモーターの動かし方はプログラムされたソフトウェアで指令が出されているというわけ。
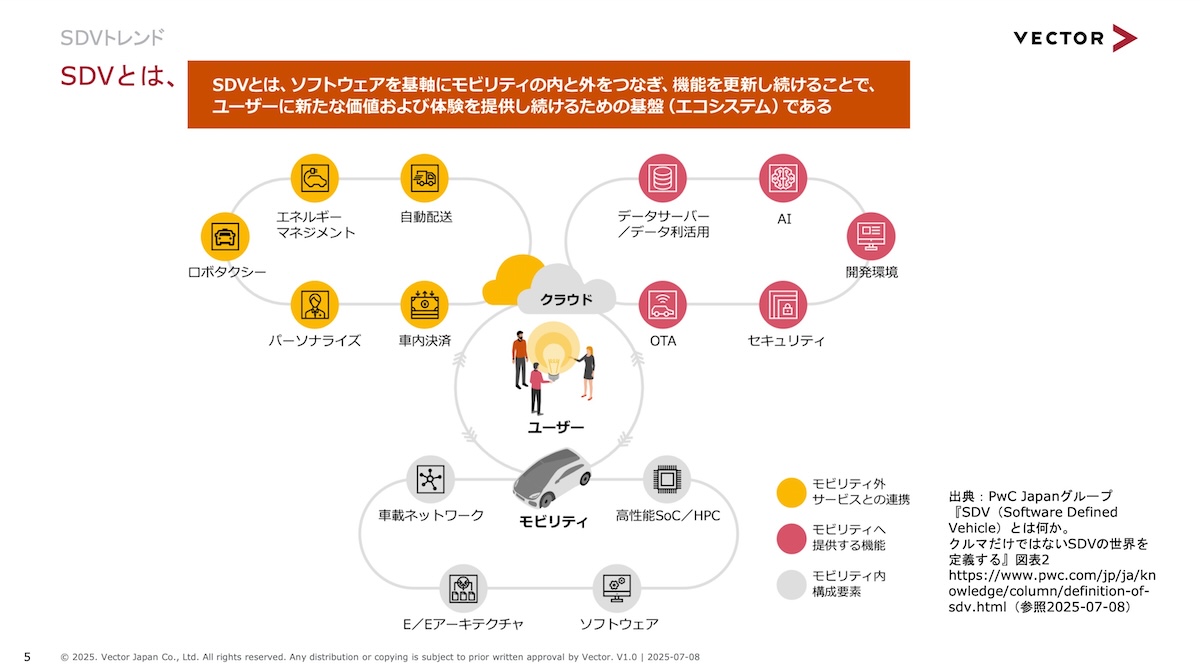
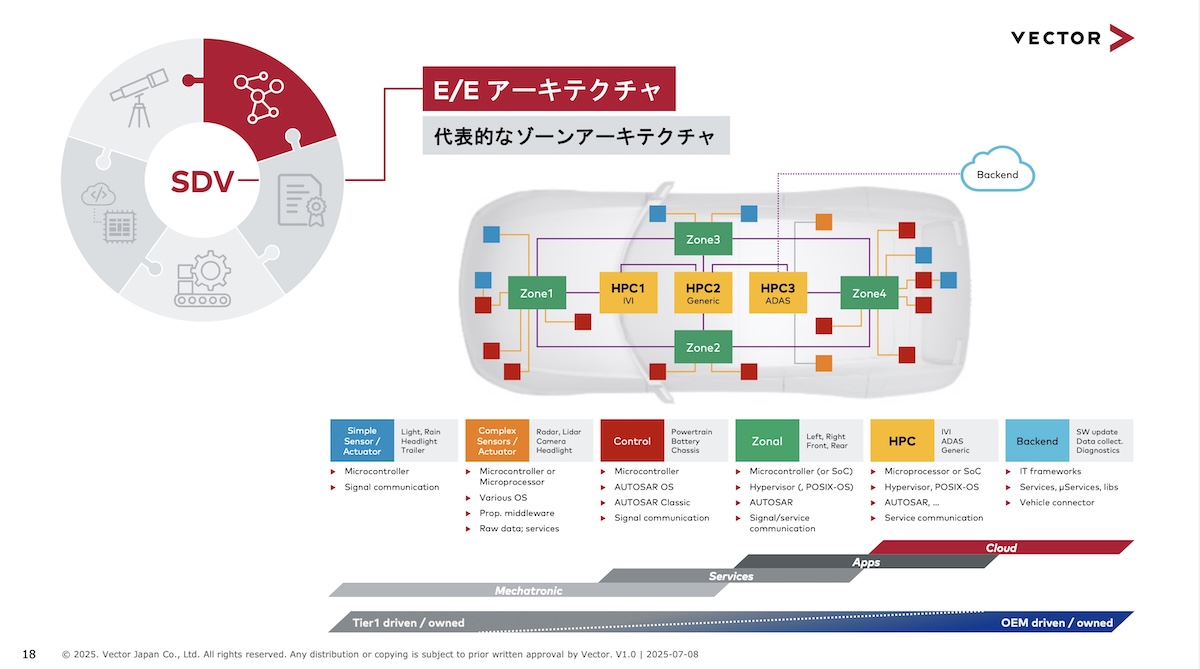
現在、そのソフトウェアで制御されている領域がパワートレイン系、AD/ADAS系、ボディ系、そしてインフォテイメントのIVI系といったドメインで分けているケースが多い。このドメインの分類の仕方は代表的なもので、別なゾーニングをしているケースもある。
このようにクルマは、すべてソフトウェアで動かされるようになることをSDVと呼んでいるわけだ。そして、今回のキーは、SDV化するために自動車業界では何を、どうやっているのか?その辺りを自動車開発者向けツールや組込みソフトウエアを販売するVECTORから、詳細な情報を得る機会があったのでお伝えしていこう。
ECUとCAN通信の基本構造
現代の車両にはECUが数多く搭載されており、それらの通信にはCANが広く使われている。これは1986年にボッシュが開発、公開した通信規格で、その開発者がボッシュから独立して立ち上げたのがVECTORだ。
ECUの通信には通信速度や容量が影響し、データの種類も複雑化している。そのため現在の車両ではCANや速度を上げたCAN FD、逆にロースピードでも問題ない通信にはLIN、さらには画像などの大容量の高速通信にはイーサネットなどの通信規格が用いられている。
そうした車載ECUはネットワークで繋がる形に変化したため、通信プロトコルが必要になり、上記の規格で通信されるようになっているのが現在地だ。
さて、クルマは車載ECUによって動いているわけだが、VECTORでは車両の開発者向けツールを提供している。
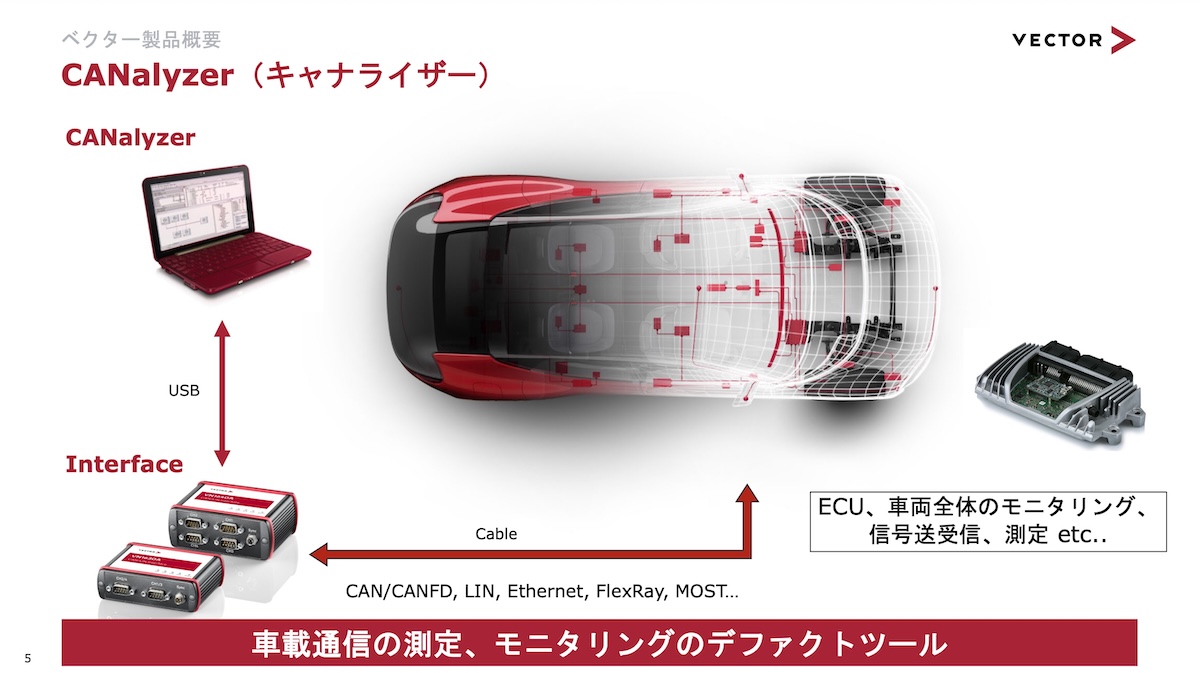
CANalyzer
まずCANalyzer(キャナライザー)。これはPCにインストールしインターフェイスにUSB接続して使うアプリケーションで、どんなCAN通信をしているのかが目視でき、車両全体のECUと繋ぐこともできるし、ひとつのECUだけを確認することもできるというもの。
CANoe
そしてCANoe(キャヌー)というシミュレーションツールで、例えばエンジンやバッテリー、エネルギーマネージメントなどのシミュレーションをECUのPC上ででき、どんな動きをするのか確認もできるツールだ。

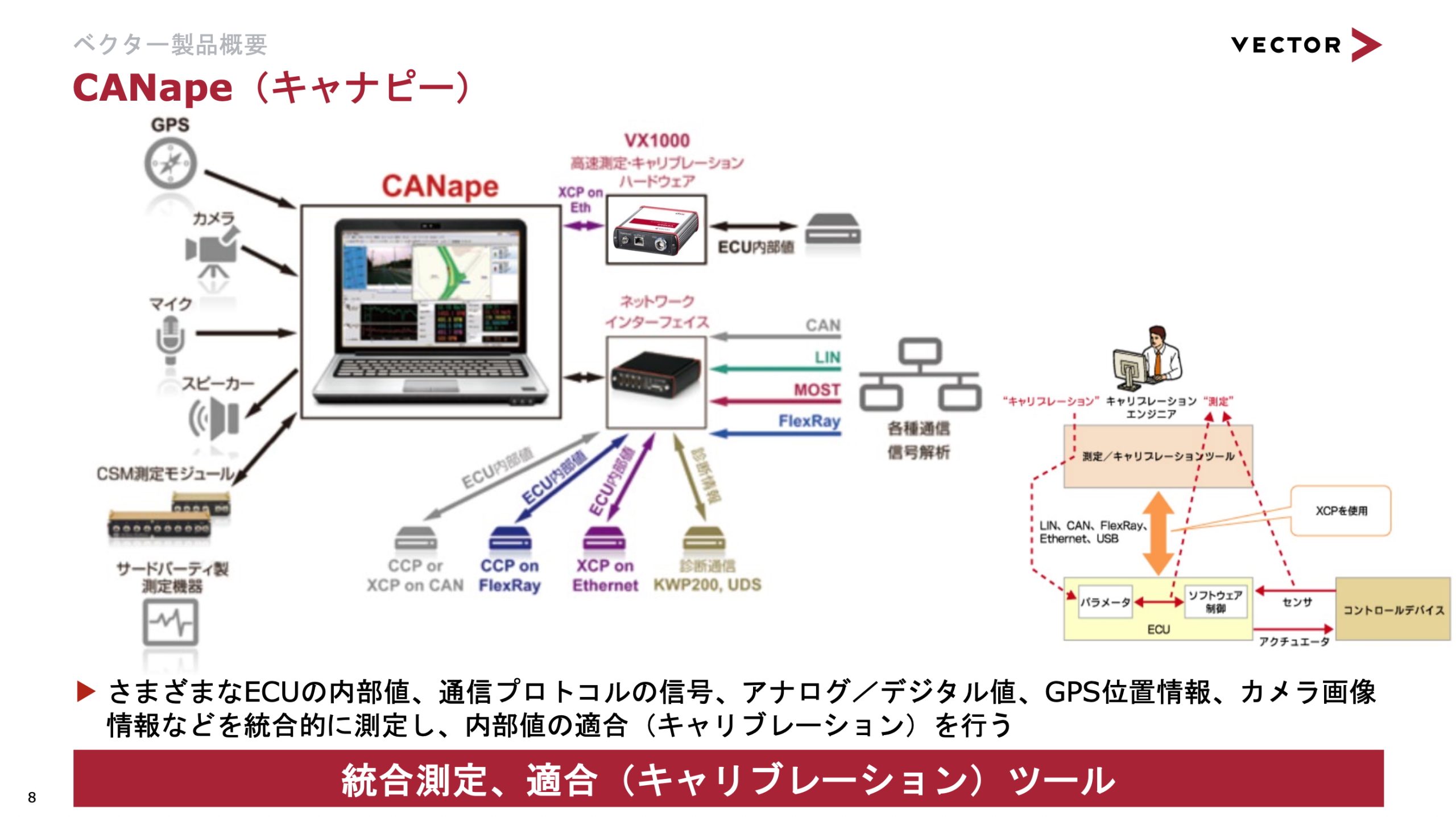
CANape
もうひとつはCANape(キャナピー)でキャリブレーション・ソフトウェアだ。例えば燃料噴射容量や噴射圧は正しく噴射されているのか?意図したものになっているのかが検証でき、GPSやカメラ、マイク、パルスなどの信号を入力して適合を見るツールだ。
これらのツールは世界中のほぼすべての自動車メーカーが使用しているツールで、V字型開発サイクルの全領域をカバーすることができるのだ。
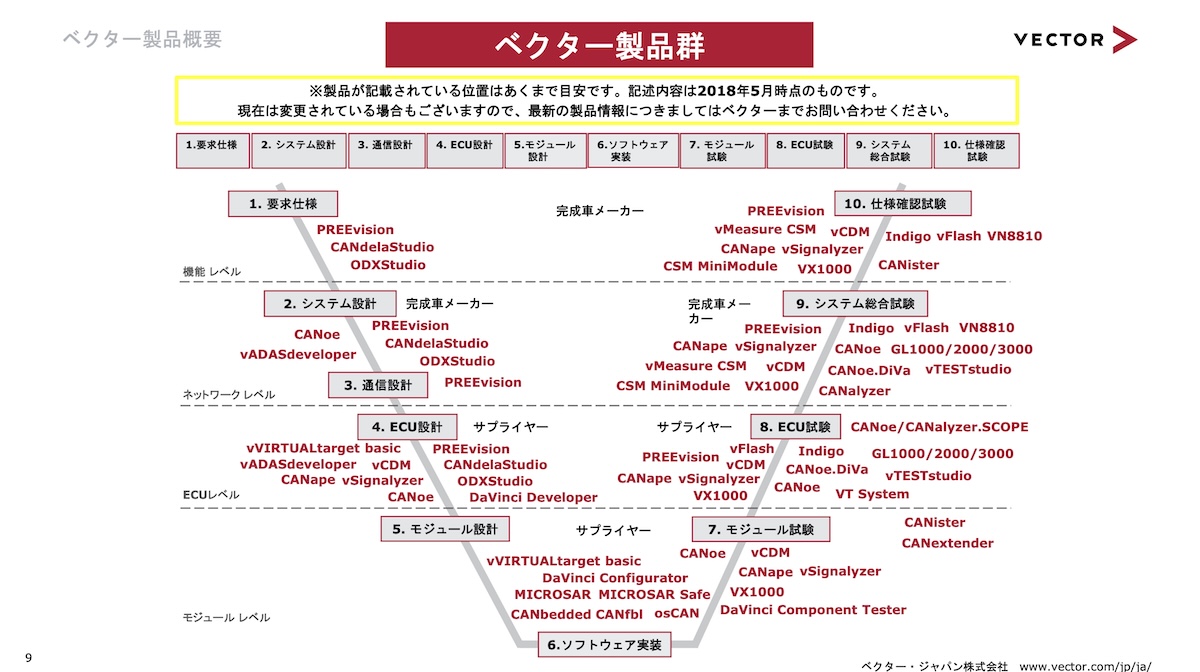
つまり、目標性能にするにはECUのレベルや評価が必要で、それらをチェックするツールが必要となり、VECTORは、どういった性能のECUが必要であり、そのECUで大丈夫なのかといった、評価ツールまでの製品を揃えており、そうしたツールベンダーはVECTORだけだという。
SDV時代とOTA対応の必要性
つぎにSDVの時代に向けて重要になってくるのがOTAへの対応であり、ECUの統合が必要になってくる。さらにヴィークルOSの存在も現れてくる。そこで最初に理解しておく必要があるのがAUTOSAR(オートザー)だ。
Automotive Open System Architectureの略で、ECUの共通言語のイメージだ。2003年に始まり、欧州、北米が中心だったが、近年アジア圏も増えているという。もともとECU同士の通信仕様は各OE(自動車メーカー)が作っていたが、サプライヤーは各OEM向けに仕様を変更して製造する必要があった。
同じ製品でありながら仕様が異なることで、テストも必要となり、これは無駄なことではないかという理解が進み、通信規格は競争領域ではなく、協調領域となり、AUTOSARがその標準化になったという経緯だ。

そして2013年ごろのメルセデス・ベンツやBMWがAUTOSARになって製品を量産している。業界ではAUTOSAR classicと呼んでおり、現在ではすべてのOEでAUTOSARで標準化されているわけだ。
こうした標準化で進めるコアパートナーがメルセデスやBMW、GM、トヨタ、フォルクスワーゲン、ステランティスであり、Tier1のボッシュやコンチネンタルといったサプライヤーたちだ。そのコアパートナーに次ぐポジションに、プレミアム・パートナープラスがあり、そこには3社ある。
VECTORとデンソーと華為(ファーウエイ)の3社で、標準化するにあたり、仕様の策定などを行なっている企業だ。
SDV実現に向けたVECTORの戦略的位置づけ
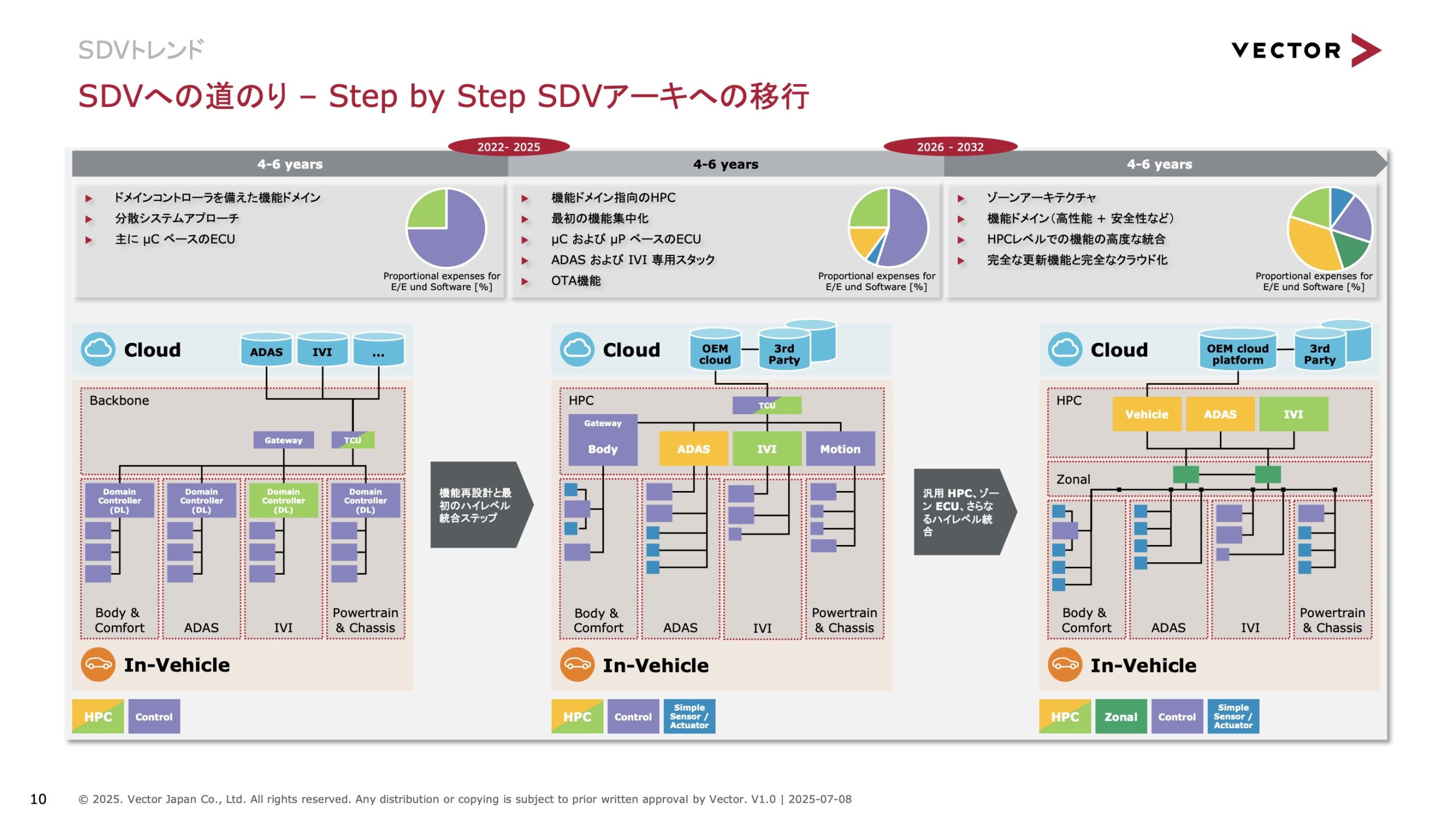
さて、OTA(over the air:オンライン・アップデート)はクラウドとの通信で行なわれるが、従来のように各ハードパーツやアプリを動かすためのECUがそれぞれに存在していたら、アップデートができないことはわかると思う。そのため、ECUの統合が必要となってくるわけで、それが冒頭のドメインで区分された4つのドメインに集約しているのが現在だ。
OTAではAD/ADASのアップデートが仮にあるとしたら、それを統合制御するECUにアクセスすればアップデートが可能になり、個別にアクセスする必要がなくなるといった構造を作る必要がある。これがE/Eアーキテクチャーと言われている領域で、現在進行形で次世代車へのアプローチが行なわれているのだ。
さて、ECUはそもそも特定の機器に指令を出す機能を持つものだが、統合してく過程で標準化されたソースコードを使っていかなければECU同士の通信は成立しない。そのECUに組み込むためのソースコードの使用権を販売しているのがVECTORだ。
VECTORではそうした組込みソフトウェアをMICROSARという商品で対応している。これはAUTOSAR classicをベースにした組込みソフトウェアで、通信ミドルウエアとも言われているものだ。このソフトウェアを使うことでECUの統合が可能になり、OTAへの対応も見えてくる。
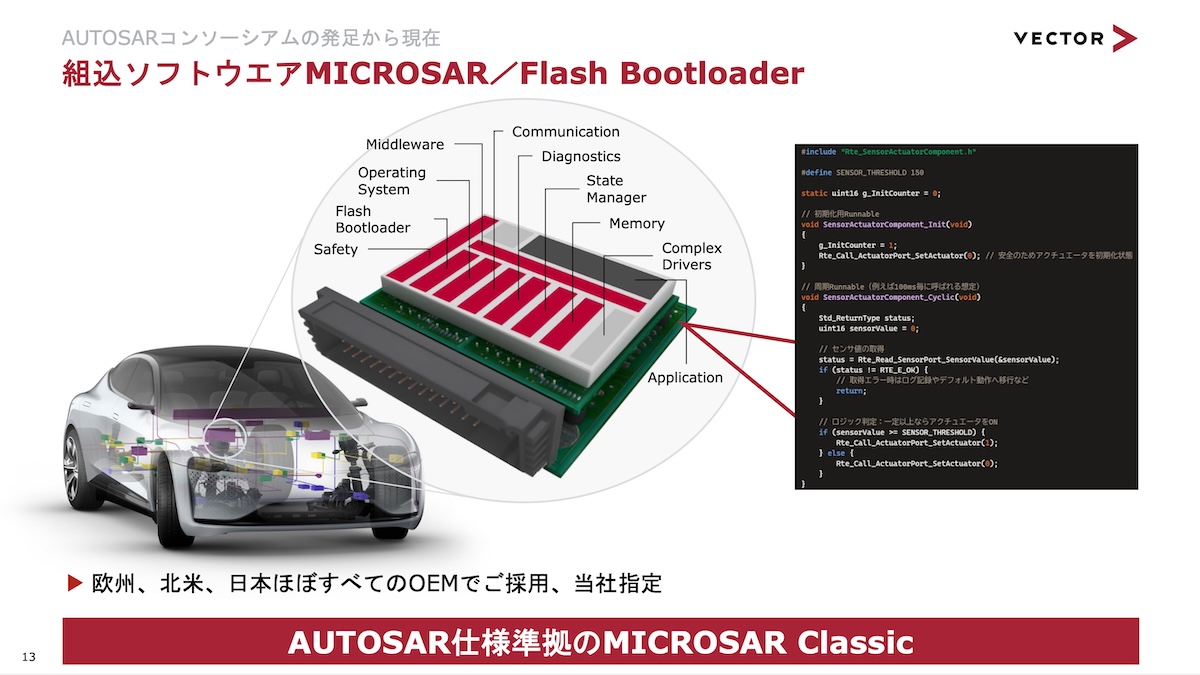
次にECUに組み込まれた機能のアップデートが必要になった場合、上書きや書き換えが必要になるが、それがFlash BootloaderというVECTORの製品で書き換えることができる。例えばブレーキの効き具合を変更しようとか、EPSの手応えを変更するといった変更が可能になる。
そして標準化されたクラッシックのプラットフォームで行なっていたものが、ECUの統合、つまり、集約型となり、SoCへと変化してきている。つまり、システムonチップだ。そのためにクラッシックからアダプティブプラットフォームへとなり、VECTORでもAUTOSAR Adaptiveで対応している。
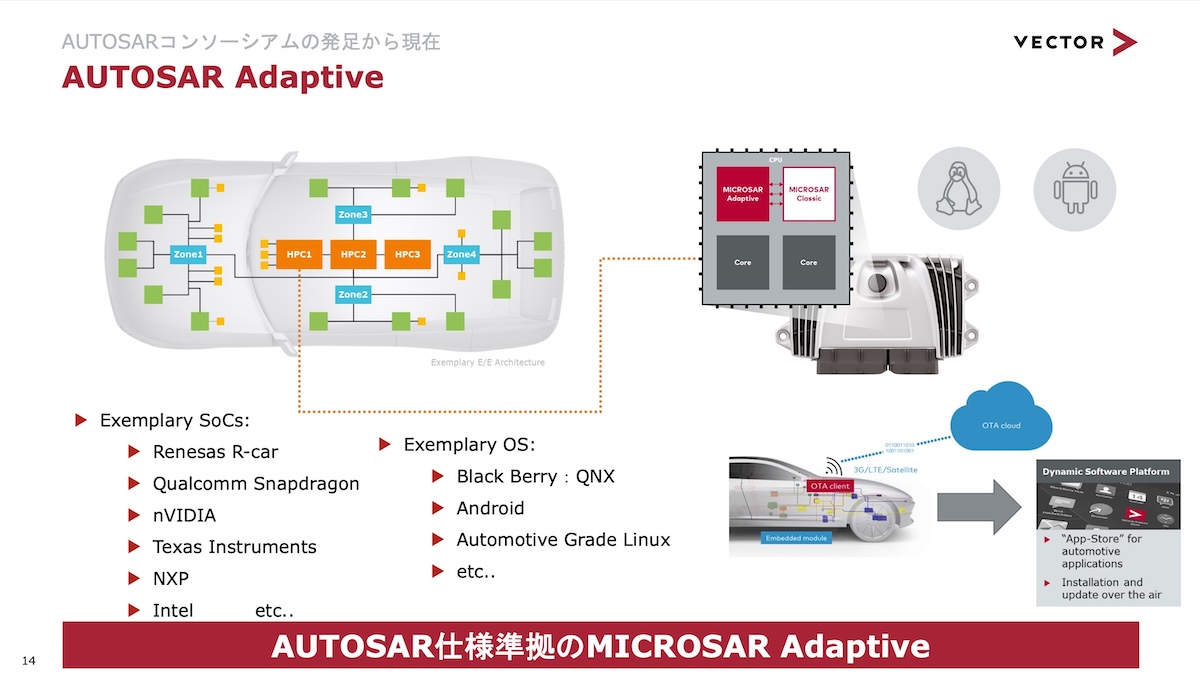
VECTORではそうした標準化のプラットフォームであるクラッシックとアダプティブ、そして基本的なファウンデーションで、プラットフォーム・ソフトウェアの仕様と開発手法の標準化を行なっているのだ。
このAUTOSAR AdaptiveはOS通信用プラットフォームと考えられ、OSはビークルOS(車両オペレーションシステム)と呼ばれており、フォルクワーゲンのCARIADやトヨタのアリーン、そしてホンダのASIMO OSらが相当する。
一方のAUTOSAR Adaptiveで対応するSoCでは、例えばRenasasのR-carやQualcommのSnapdragon、nVIDIAなどがあり、ビークルOSではAndroidやブラックベリー:QNX、Automotive Grade Linuxなどに対応してく必要があるのだ。
こうした組み込みソフトウェアによってSDVが実現していくわけで、VECTORの製品が果たす役割は重要になっていくことがわかる。
まとめ
さて、一般ユーザーには無縁のSDV開発の説明だったが、こうした開発が行なわれることで、次世代車が次々に生まれてくる時代が到来している。あまり実感が湧かないかもしれないが、20年前と比べてエンジンの性能が良くなり、車内環境が良くなり、ナビゲーションがあることで道に迷うこともなくなり、そして渋滞時には運転支援機能によって運転疲労が軽減されていることに気づくかもしれない。
これがさらにSDVの進化によって、どんなユーザーメリットがあるのか、どんな価値を提供してくれるのか、楽しみな自動車産業といえないだろうか。













