Bosch mobility experience 2017 report @Boxberg vol.5
前回は、自動運転を実現するために、すでにあるドライビングアシスタンスと、これから必要とされてくるソリューションのワークショップレポートをした。今回はさらに、その先必要とされていくものについて、特に気になるハッカー対策などを踏まえたレポートをする。<レポート:高橋 明/Akira Takahashi>
【ボッシュ・モビリティエクスペリエンス2017レポート】
・vol.1 EV化、自動運転、常時接続は避けては通れないクルマの未来
・vol.2 ストレス・ゼロのアーバンモビリティとは何か?交通インフラの再整備
・vol.3 自動運転にAI人工知能は何故必要なのか?
・vol.4 自動運転のためのソリューションレポート ドライビングアシスタンス篇
・vol.5 自動運転のためのレーダーロードシグネチャー&ハッキング篇
・vol.6 NOxとCNGで空気の質を改善
完全な自動運転は事故ゼロ、そしてエミッションゼロ、ストレスゼロが到達点となるだろうが、その目標に向かって立ちはだかる問題に対し、新たな技術を投入していく必要がある。
■レーダーロードシグネチャー搭載
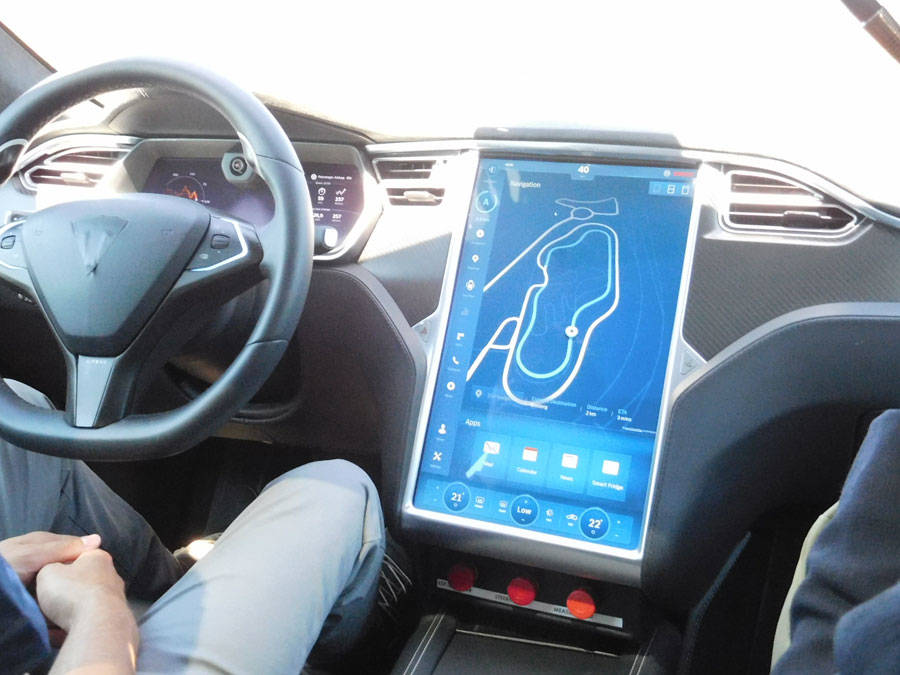
テスラを使ってのデモンストレーションでは自動運転のレベル3の実現で、そこにはドライバーのモニタリングと自車位置を正確に把握するためのソリューションを見せてもらった。
カメラはメーターパネル部に取り付けられ、ドライバーの顔を捉え、行動を認識する。クルマに車載されるレーダーでは、ボッシュが開発した世界初のレーダー波を使って自車位置を測定する装置で、レーダー ロード シグネチャーが搭載されている。
テスラのモニターに映し出された緑や黄色、赤色は、ガードレールや道路標識などあらゆるところに当たるレーダー波のリフレクションポイントを示すもので、数10億に達するリフレクションポイントが、道筋に沿ってそれらの対象物を再現し、地形情報を生成していることを示している。

テストカーでは、この地形情報と高精度な3Dマップとが組み合わされて、正確な自車位置がはじき出され、そして車載するカメラ画像からの情報も含んで自動運転が行なわれていた。
そして実用段階では、こうしてクルマのレーダーから得た情報はクラウド経由となり、さまざまなクルマがデータを共有することが可能になるわけだ。
■ハッキング対策とローカリゼーション
さて、こうして自動運転へハードな部分は一歩一歩近づいているが、今度はセンサー技術で得たデータの有効活用方法についてのワークショップだ。
自動運転では、自車位置をより正確に把握する必要があり、どのようにマップを使うのかというのもポイントになる。GPSの問題として、じつは精度というのがある。間違った情報を出すことがあり、2メートルから10メートルずれることもある。ハンドルを切るタイミングが2メートルも狂ってしまえば、交差点は曲がれず役には立たない。
そのためハードな技術では前述のレーダーロードシグネチャーとカメラなどのセンサー技術で正確な位置情報は得られる。だが、例えば、新しい工事現場ができた、車線規制ができた、などリアルタイムでクルマが知る必要がある情報は必須だ。人は見ればわかるが、クルマも理解する必要がでてくるからだ。それにはダイナミックデータが必要で、リアルタイムのクラウドからのデータが必須となる。
また、危険ゾーンの認識も必要で、例えば外気が4度以下になると凍結の危険がある、という表示で人は路面凍結を想像できるが、機械は想像しない。そして、そこにもリアルタイム情報が必要で、どこでどんな状況かを理解する必要があり、そのためには地図更新ができるものでなければならない。
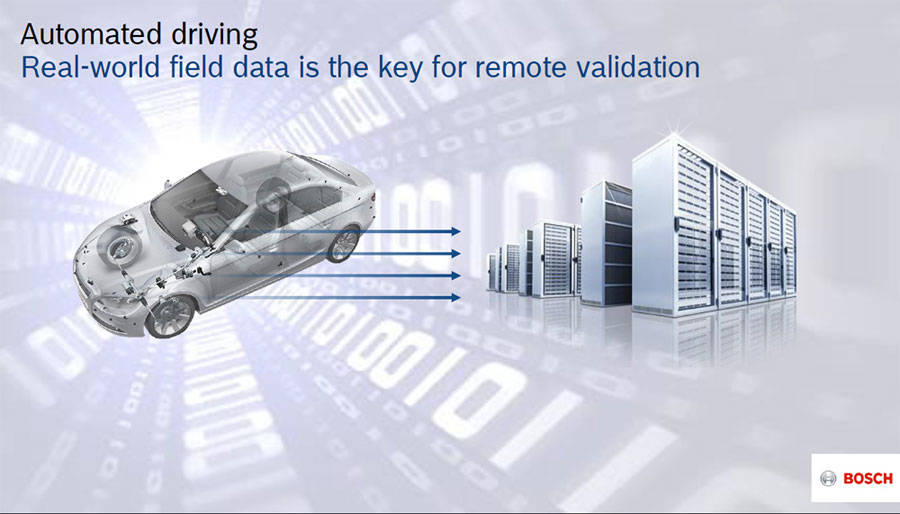
こうしたリアルタイム情報に対しては「ボッシュクラウド」という形で取り組み、常時接続される車両に情報が供給されていく。
■ハッキングから守るセキュリティ
これらは、いずれもクラウドとの常時接続で、さまざまな情報を得るという理屈の上で成り立っているが、そこにはハッカーの存在がある。ただ、ハッカーは悪気はなくても、自分はどこまでできるかトライしたくなるものという特徴もあり、例えばクルマを乗っ取って何ができるか?という事件がすでに起きていることからも理解できるだろう。
したがって、クルマにはECUが複数搭載され、暗号化して運用されているが、次のレイヤーとしては車内のネットワークに対するセキュリティが必要だ。車載のECUどうしが相互にコミュニケーションしているので、それを保護する必要がある。
ボッシュではE/Eアーキテクチャー(電気/電子)というハードウエアのセキュリティモジュールにおいて、クルマが得たさまざまな情報は安全に守られていなければならないと考えている。そのセキュリティの一番外側にファイヤーウォールがあり、いろんな形で通信をしながら、外からも入ってくる情報すべてを暗号化し、定期的にその暗号も変更する。そしてそこには入り込めないようにするという方法だ。
この暗号化では、20の記号があればスーパーコンピュータを使っても数日かかるような暗号化ができるという。ハッカーが30台のクルマを同時にハッキングして、集団で事故を起こさせるということは起こりえないと説明する。つまり、1台1台が暗号化されているからで、すべてのクルマの暗号化は共通ではなく、まったく異なるからだ。だから、不可能とは言わないが、かなりハードルは高いのだと。
そして最後に、いろいろなことがあるので、慎重に対応していく必要があり、実際にハッキングできるかを試していることも明かした。
■HMI

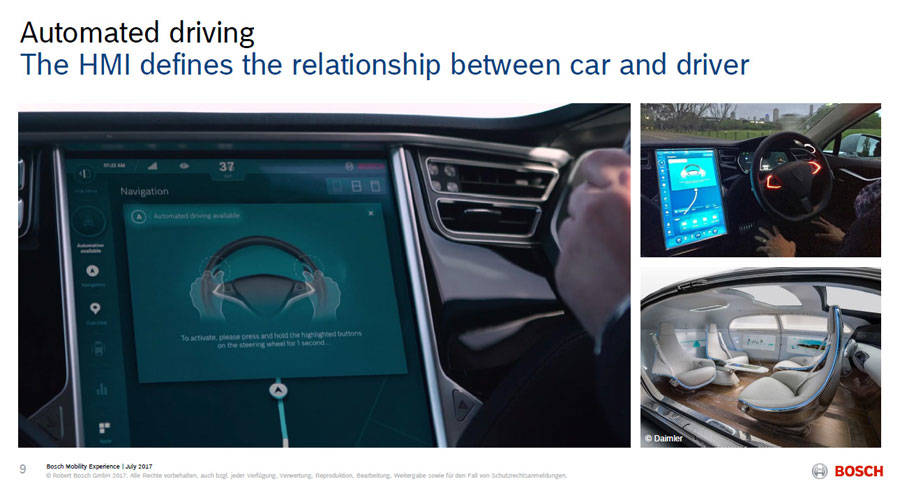
最後に、自動運転のもうひとつ難しい要件につていレポートしよう。とても重要なHMIについてのワークショップだ。
完全自動運転の車両に求められる車内環境で、HMI、つまり人間と機械とのインターフェイスにおいて、どうするのが最も人は快適と感じるのか?というもので、難しいテーマだ。
それは、目に見えない動きをコントロールすることだという。クルマに乗って新聞を読んでいるときに、いきなり車線変更したら新聞は読めない。自動運転車はスムーズに流れるように車線変更してくれないとだめだ。HMIはクルマと乗っている人との間に存在しているとイメージしてほしいと説明する。
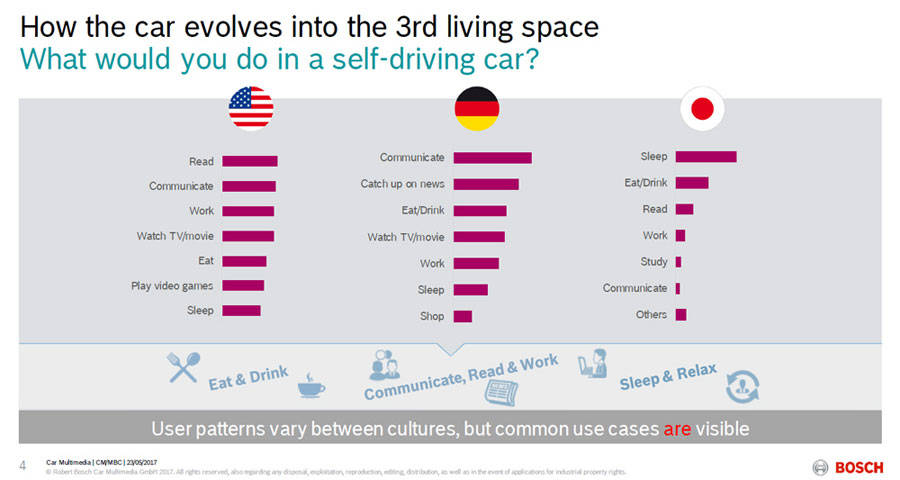
つまり、見える化するというのは非常に難しいことで、ユーザーはクルマに求めることとして、何をやっているのか、あるいは、どのようにやっているか教えてほしい、ということを求めたりする。また、いろいろな機能があるのはうれしいが、いつも必要であるわけではなく、不要なものは消したいと思うのが人の心理で、反対に、消せないようにしたいという人もいる。だから人がクルマに望んでいるものを、シンプルに見える化するのはかなり難しいということが分かる。
もちろん、こうあるべきだというのがあれば、誰もが快適に乗れるわけで、快適であればシステムを信頼し、そうすれば利用者が増える。つまりシーティングコンフィギュレーション、最適化の見える化ということかもしれない。
そうなれば、家のリビングでのんびりするように、ドイツからイタリアへ旅行できるわけで、HMIは快適性を実現するために、重要な位置づけのモノということが理解できたと思う、という説明で締めくくられた。
【ボッシュ・モビリティエクスペリエンス2017レポート】
・vol.1 EV化、自動運転、常時接続は避けては通れないクルマの未来
・vol.2 ストレス・ゼロのアーバンモビリティとは何か?交通インフラの再整備
・vol.3 自動運転にAI人工知能は何故必要なのか?
・vol.4 自動運転のためのソリューションレポート ドライビングアシスタンス篇
・vol.5 自動運転のためのレーダーロードシグネチャー&ハッキング篇
・vol.6 NOxとCNGで空気の質を改善













