この記事は2018年4月に配信した有料メールマガジンを無料公開したものです。
2018年3月19日夜、アメリカのアリゾナ州テンピの公道で自動運転の実証実験中だったUber(アメリカ配車&シェアリング企業)のテスト車両が道路を横断している主婦と衝突し、主婦は死亡するという事件が発生した。実証実験中とはいえ、自動運転車が引き起こした初の死亡事故で、その影響はきわめて大きい。今回は、その真相に迫り、何が問題だったのかを考えてみよう。

■道路を横断する歩行者との事故
Uber社の自動運転実験車はボルボXC90だった。Uber社とボルボは2016年以来の戦略的提携を結び、さらに2017年11月にはより発展した契約を締結し、ボルボはUber社に多数の自動運転用の車両を販売する関係となっている。
*参考:ボルボ 数万台規模の自動運転対応車をウーバーに販売することに合意

もちろん、こうした提携によりUberとボルボはレベル4の自動運転開発に関しても共同開発に近い形になっていると考えられる。
事故の舞台となったアリゾナ州は道路環境がよいため、自動運転の公道における実証実験を積極的に受け入れている州として知られており、Uber社に限らずそれ多くの企業、メーカーが自動運転車を公道で走行している。
事故は、3月19日(日曜日)の夜10時頃に発生した。テンピ市の公道、ノースミル通りを走行中のUberのXC90が、その道路を横断しようとした自転車を手押しした状態のエレーヌ・ハーツバーグ(49歳)婦人と衝突した。
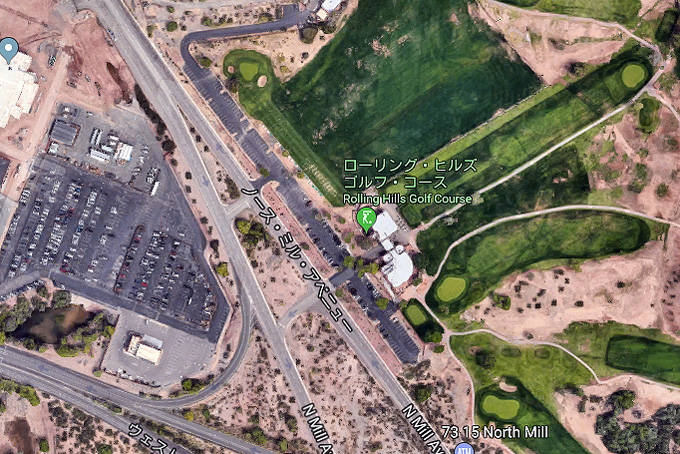
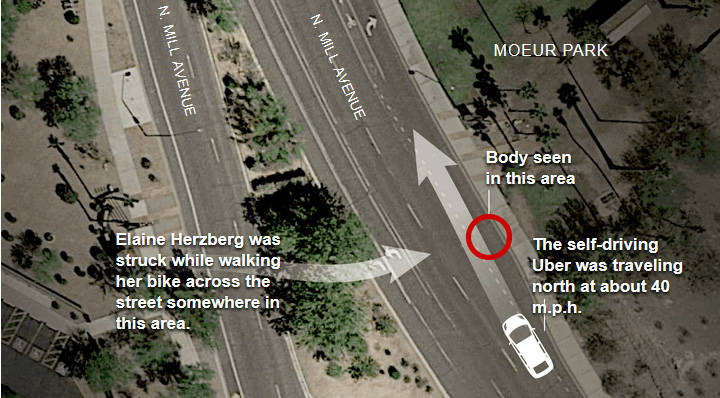
この場所はテンペ市の住宅などが密集する市街地から少し離れた場所にあり、街灯はまばらな場所で、市内の公道とはいえ、日本の感覚からすれば周囲には住宅もない幅広い自動車専用道路のような道路である。しかも道路は片側2車線の道路で、道路中央部は完全に幅の広い中央分離帯となっている場所だった。
被害者は当然ながら、横断歩道でもない場所で自転車を押しながら横断しようとしたのだが、通常の感覚では歩行者が道路を横断するような地点ではないため、なぜ被害者はこのような場所を選んで道路を渡ろうとしたのか不明だが、恐らく最短距離で道路を渡ろうとしていたのだろう。また、残されたドライブレコーダーの映像では被害者は荷物袋をぶら下げた自転車を手押しし、ゆっくり歩いており、接近するクルマに気づいていないように見える。

一方、自動運転中のXC90にとっては、周囲にクルマもなく歩行者が頻繁に出現する場所でもなく、道路中央には幅広い中央分離帯があるため、あたかも自動車専有道路を走っているような、単調で危険性の低い道路環境だったといえる。
XC90は約60km/hで自動運転状態となっており、これは法定速度を少し下回る速度だった。また市街地の道路のためヘッドライトは下向きだった。このような状態で、道路を自転車を押しながらゆっくり横断する歩行者にXC90がノーブレーキで衝突する事故となった。
この事故を報じる日本のテレビに出演した自動車関連コメンテーターは、「ヘッドライトが下向きで周囲は暗く、歩行者を検知できなかった」などとコメントしていたが、まったくの的外れである。
衝突の瞬間は、Uberのドライブレコーダーによって記録されている。このドライブレコーダーは、XC90に乗っているドライバーと、クルマの前方の撮影映像の2種類があるが、最先端の自動運転システムを開発する企業としては、実におそまつな低感度、低解像度のドライブレコーダーだったのに驚かされる。
この点については、アメリカの市民からも、実際の道路状況を撮影したドライブレコーダーの映像より事故映像は異常に周囲が暗く写っているという指摘がなされている。
低解像度のため、ヘッドライトの照射する正面付近しか写っていなかった。その映像を見て、周囲はとても暗かったから・・・とコメンテーターは語ったのだ。しかし、実際にはまばらながら街灯はあり、また下向きヘッドライトとはいえ左右の照射角は記録された映像よりずっと広いはずだ。
さらにコメンテーターは大きな誤認をしていた。レベル4の自動運転のため、基本的に乗車しているドライバーの役割は実証実験用のデータをモニターするために乗っており、レベル3のように、いざとなれば自動システムに代わって運転するという役割とは違う、とドライバーは認識していたはずで、実際に映像に残されたドライバーは車両中央部のモニターを眺めており、一瞬だけ側方の道路側に視線を向けている。
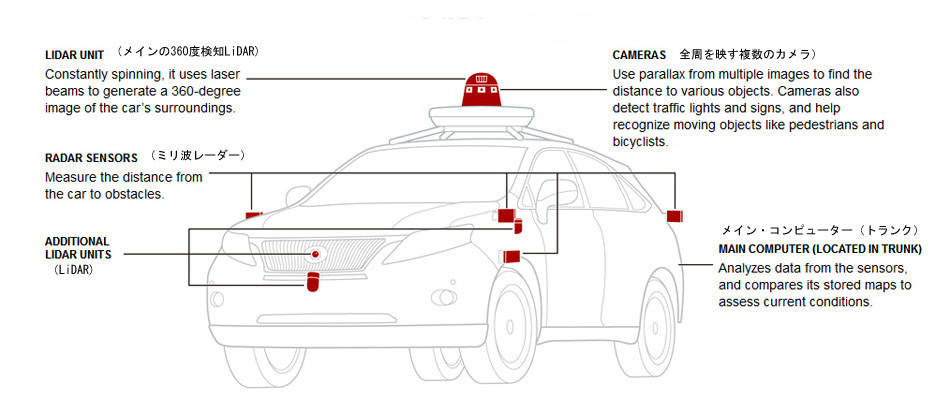
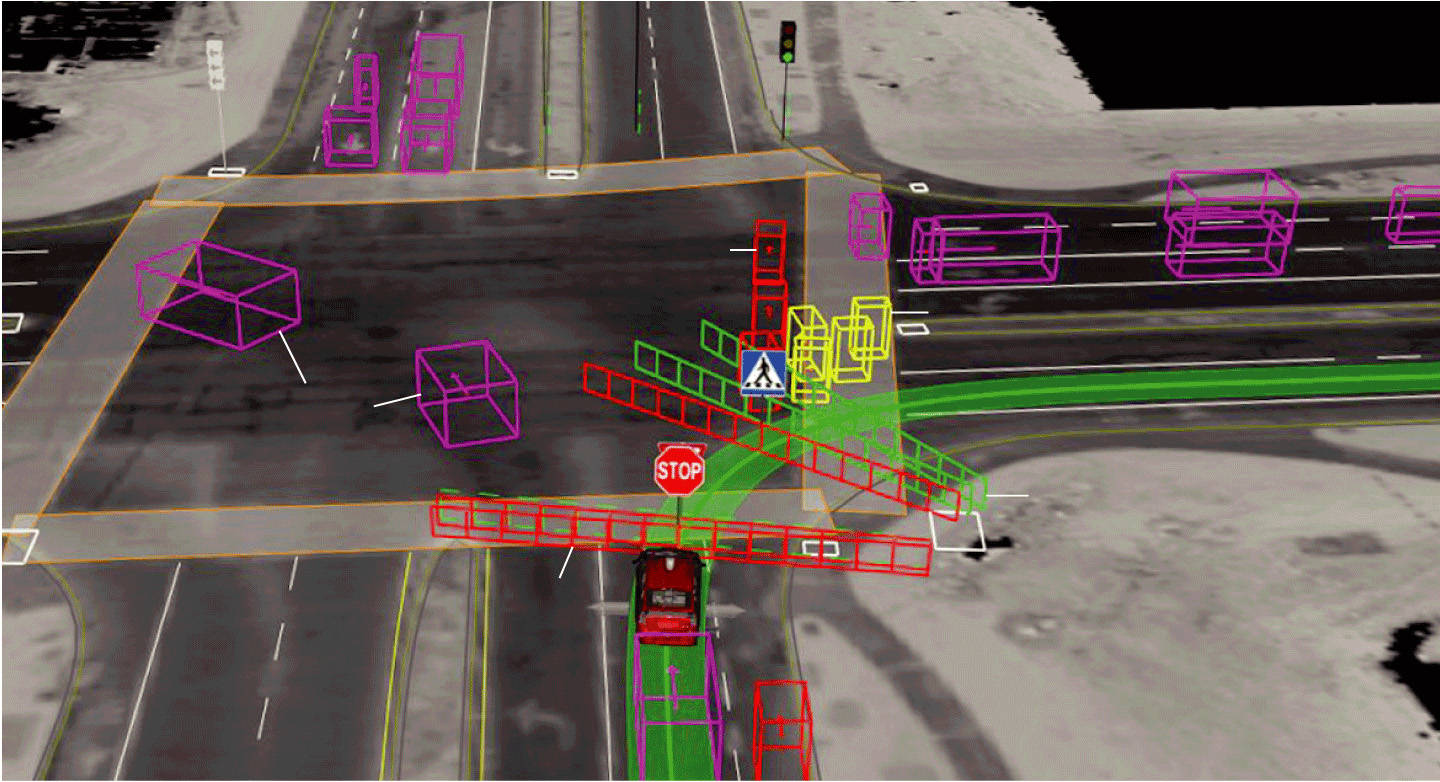
もう一つ、コメンテーターの根本的な誤認は、この自動運転実験車の装備に関してだ。イラストのように、ミリ波レーダー、前方&側方用のLiDAR(ライダー)、クルマのルーフ上には360度を撮影している複数のカメラ、さらに高速回転しながら360度の地形や物体を検知する高性能LiDARが備わっており、例えカメラが暗くて物体を把握できなくてもLiDARは昼夜を問わず地形や物体を検知できるのだ。ちなみにLiDARはレーザー光を多数発射しその反射波により地形を3次元マップ化し、物体を立体として検知するシステムで、メインのLiDARは少なくとも120m以内の物体や地形を検知できる能力を持っている。
今回の場合は、ヘッドライトが下向きとはいえ、横断する物体はカメラでも検知できたはずだし、さらにLiDARはより鮮明に検知ができたはずだ。だから、自動運転のシステムとして、暗いから横断する歩行者を検知できなかったというのはまったくの誤認なのだ。
しかし、深刻なのはLiDARやカメラで歩行者を検知できていたはずなのに、自動緊急ブレーキが作動していないことだ。つまり、センサーは検知していたが、自動運転システムとしては危険と判断していなかったことを意味する。

ちなみにXC90に搭載されていたLiDARは、アメリカのトップメーカーのヴェロダイン社製であった。ヴェロダインのCEOは、「私たちは非常に困惑している。現在、国家運輸安全委員会と国家道路交通安全局の捜査に協力している。まだ当社のエンジニアを現地に派遣していないが、要請があれば積極的に協力したい」と語る一方で、「当社のLiDARは、今回の事故が起きた状況下でも歩行者や自転車を鮮明に画像化できる能力を持っている。しかし、LiDARがブレーキを掛けたり、通行人を避ける判断を下すわけではない。事故を起こした車両にどのようなセンサーが搭載され、それらがどのように使われ、きちんと機能していたかについて我々は把握していない」と語っている。
またこの自動運転のメインコンピュータには、今や自動運転システムの構成に欠かせず、圧倒的なシェアを持つNVIDIA(エヌヴィディア)製が使用されていたといわれる。ただ、NVIDIAはハードウェアと、自動運転のソフトウエアの両面でビジネスを展開しているが、Uber社はNVIDIAのハードウエアは使用しているが、自動運転システム自体はUber社独自のものだという。
このためNVIDIAのジェンスン・フアンCEOは、「我々も報道以上のことは何も知らない。何が起こったのか現時点ではわからないので、コメントすることはできない」という。
だが、明らかにUberの自動運転システムは、横断する歩行者をシステムとして認識できなかったわけで、業界に深刻な影響を与えており、NVIDIAもトヨタも自動運転の公道での実証実験を一時停止すると発表している。当然、自動運転の公道での実証実験を歓迎していたアリゾナ州も、態度を変えつつある。
一方で、世界でも最も早い時期から公道での自動運転の実証実験を開始し、現在では日本、アメリカのシリコンバレー、イギリスでの公道実証実験を行なっている日産は、実証実験を中止する予定はないとしている。
日産の場合は、公道でのレベル4の自動運転の実証走行時には、いつでもマニュアル運転ができるように特別に訓練されたドライバーが運転席に乗り、助手席にシステムの作動をモニターするエンジニアが乗るという万全の体制で、実証実験を行なっているという。
ちなみに日産の最新の公道を走行している自動運転実証実験車はインフィニティQ50で、12個のソナー、12個のカメラ、9個のミリ波レーダー、6個のレーザースキャナー(LiDAR)、HDマップを搭載している。
今回の事故の原因は、けっきょく自転車を手押ししながらゆっくり横断して歩く歩行者を、歩行者として認識できなかったことであるが、それは画像認識で「自転車を押す歩行者」を歩行者として判定できなかったことが原因と考えられる。
よく似た例として、道路上に出てきた動物に対して自動ブレーキを効かせるためには、歩行者とは明らかに形が違う動物も危険な存在として、システムに覚え込ませる必要があるのだ。
そういう意味でも、レベル4の自動運転を実現するためには、まだ気が遠くなるような実証実験を積み重ねる必要があることが実感できる事件である。













