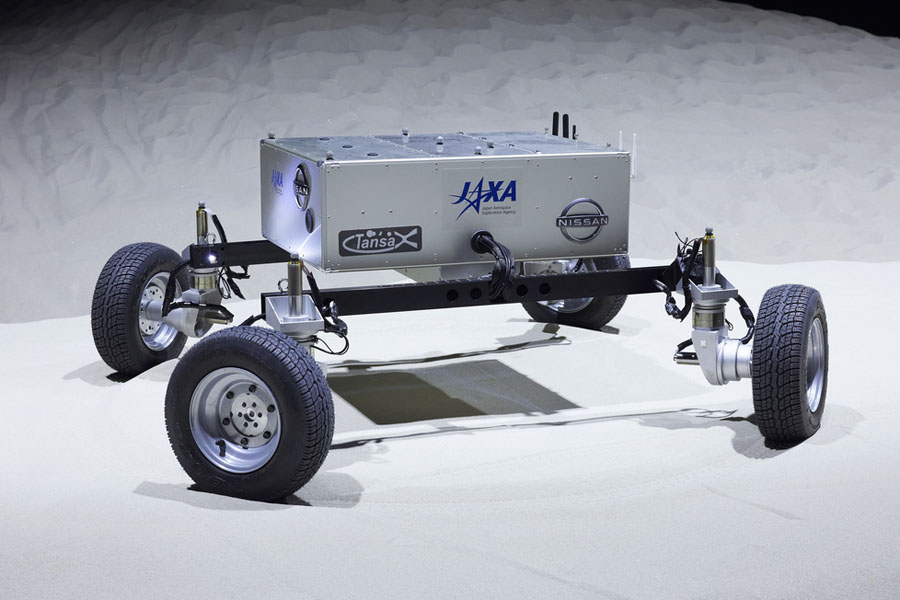
日産自動車は2021年12月2日、日産グローバル本社ギャラリーで開催される「NISSAN FUTURES」の展示で、国立研究開発法人宇宙航空研究開発機構(JAXA)と共同研究を行なっている月面ローバ(探査車)の試作機を公開した。

JAXA宇宙探査イノベーション活動では、宇宙探査に必要な技術の一つとして月面ローバの研究が行なわれている。月面は砂地で覆われ、起伏に富んだ場所が多く、過酷な環境下にある。
また、走行用のエネルギーも限られるため、月面ローバには高い走破性や高効率な走行性能が求められる。日産は2020年1月から共同研究に参画し、「リーフ」に代表される電気自動車の開発で培ってきたモーター制御技術と、「アリア」に搭載される電動駆動4輪制御技術「e-4ORCE」を応用し、月面ローバの駆動力制御に関してJAXAと共に研究を進めている。
日産の「e-4ORCE」は、電動駆動ならではの4輪制御技術で、どのような環境下においても車両姿勢を制御することが可能で、走破力の面でも高い性能を発揮することができる。「アリア」に採用されているe-4ORCEは、前後に合計2基の電気モーターを搭載し、それぞれのトルクを個別にコントロールすることが可能。加速時のトラクション性能はもちろん、減速時においても前後のモーターそれぞれで回生量を調整し、ブレーキ時のクルマの沈み込みを減少させるなどといった車体の揺れを抑える制御を行なっている。
またコーナリング時は、前後のモータートルクと4輪のブレーキを協調制御することで、ドライバーのステアリング操作には忠実で、滑らかで心地よいハンドリング特性が得られる。
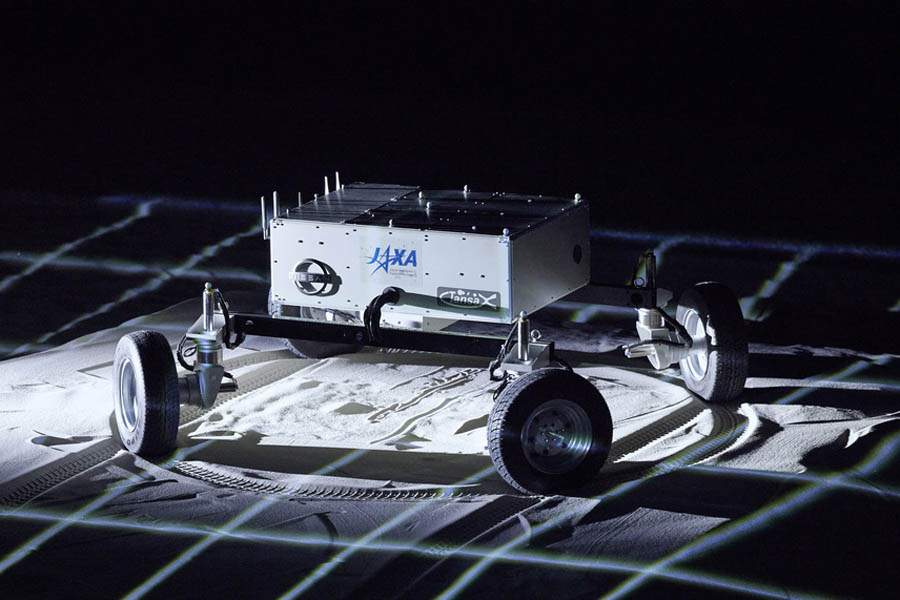
JAXAとの共同研究では、この「e-4ORCE」をさらに進化させ、砂地などの過酷な環境下での走行性能を高める技術開発を行なっている。
砂漠などの砂地をクルマが走行する際には、タイヤが空転し、砂に潜ることで脱出困難な状態(スタック)に陥ることがあるが、このような事態を回避するためには、ドライバーがタイヤの空転量を繊細にコントロールする必要があり、非常に高い技量が求められる。
この研究では、路面状況に応じてタイヤの空転量を最小限に抑え、様々な路面環境において走行性能を高める駆動力制御を研究、開発している。
タイヤの空転量を最小限に抑えることは、砂地でのスタックを回避できるだけではなく、空転によるエネルギーロスを最小化することにもつながり、結果として走行エネルギーを効率化することにもなるのだ。過酷な環境下での走行性能を高め、走行エネルギーを効率化する技術の開発は、月面で走るローバだけでなく、地上で走るクルマの走行性能も向上させることができる技術につながる。
この共同研究を通じ、テストカーの開発で得た日産の知見と、ローバの研究で得られたJAXAの知見を互いに共有することで、地上を走行するクルマと宇宙探査の両面で技術を進化させることを目指している。













