戦略的イノベーションプログラム(Strategic Innovetion Promotion Program)、通称SIPの自動運転プログラムの第2期が今年度で終了する。今回、SIP自動運転の第1期から第2期にかけての成果報告と体験試乗会があったので、その様子をお伝えしよう。

SIP-adusのビジョンはInnovetion of Automated Driving for Universal Serviceー人々に笑顔をもたらす交通社会を目指してーというテーマで活動しているが、SIP-adusは内閣府が主導するプロジェクトで、河野太郎大臣のデジタル庁がシナリオをリードしながら司令塔となり、総務省、経産省、国土交通省、警察庁などが入り、府省連携、産学官連携による自動運転開発の推進をしているものだ。そこでは基礎研究だけでなく、事業化までを進める狙いを持った取り組みだ。
つまり、自動運転技術開発においてカーメーカーやサプライヤーだけでは実用域には到達できない領域があるため、内閣府が主導的立場から協調領域を精査し、国際協調まで取り付け自動運転の実現に向けて手助けしているという取り組みだ。
その第1期が2014年から18年の5年間、そして第2期が2018年から2023年の5年間があり、2023年3月で第2期が終了する。その合計9年間での活動報告と進捗、成果、そして具体的な自動運転技術を体験する試乗会を東京臨海地区で行なった。

そもそも政府はSociety5.0の実現に向けて、科学技術の推進をしている背景がある。Society1.0は狩猟、2.0は農業、3.0は工業、4.0は情報、そして5.0が新たな社会構造で、Society4.0の情報のとき、情報社会で世界のイニシアチブが取れず、GAFAMを中心とした企業によってイノベーションが起きている。
そしてSociety5.0ではサイバー空間とフィジカル空間の高度な融合によって、経済成長、社会課題の解決に繋げていこうという取り組みの中にSIP-adusがポジショニングしているわけだ。
第1期〜第2期の動き
第1期の2014年に始める段階の出口戦略=目標は
1:交通事故低減等国家目標の達成のための国家基盤構築 高齢者の移動支援、地方の活性化
2:自動走行システムの実現と普及 一気通貫の研究開発と国際連携同時進行による実用化推進
3:次世代公共交通システムの実用化 東京オリンピンク・パラリンピックを一里塚として東京都と連携し開発
といったことを掲げてスタートしている。そうした中、競争領域と協調領域があり、協調領域を探りながら以下のことを進めてきたと説明している。
1:デジタルインフラの構築
2:データフォーマットの統一
3:安全性・情報セキュリティの確保
4:国際連携・標準化
5:社会受容の醸成
6:規制改革・制度整備
こうしたカーメーカーの技術開発では不可能な領域をSIPが取りまとめ、カーメーカーやサプライヤー、大学、研究機関、ベンチャーへ提供という形をとってきた。
クルマの運転では人が認知し、判断し、そして操作という動作が行なわれているが、自動運転ではこれをシステムに置き換えるわけで、センサーと地図で認知し、コンピューター、AIで判断。そしてアクチュエーターを介して電動モーターが操作する。さらに、車載センサーと高精度地図、交通環境情報などの情報を統合し、自己位置推定をして自動運転が行なわれるが、その中でも交通環境整備が重要になってくる。

交通環境整備とは、道路の傾斜や勾配、車線情報、3次元構造物などの静的情報。そして1日単位で変化する準静的情報である交通規制予定情報、道路工事予定情報、広域気象情報などを提供。さらに、1分ごとに変わる事故情報、渋滞情報、狭域気象情報などを提供し、そして1秒ごとに変わる動的情報としてITSからの周辺車両、信号情報などが高精度地図に紐づけられる仕組みとしている。その高精度地図=ダイナミックマップは人間が見る地図ではなく、コンピューターが判断するための地図=材料であり、いかに交通環境整備が整うかによって自動運転の実現が決まってくるわけだ。
そしてSIP-adus第2期では4つの柱を立てている。
1:実証実験
2:技術開発
3:社会受容性の醸成
4:国際連携
である。これにはさまざまな立場の参加者が必要であり、国内のカーメーカーにとどまらず、欧州のカーメーカーも参加し、そしてベンチャー、大学、Tier1などが参加し情報を集めている。
それらの参加する企業、団体等に、交通環境情報をSIPが提供するというのが第2期であり、それをクルマに搭載してその中で評価する。その評価のフィードバックをSIPへ提供し、場合によっては各省庁への検討材料として提出しているわけだ。また技術開発領域は、企業、団体等の競争領域となるためSIPには不要、というスタンスで進めてきている。
そして、試す場所として実証実験が重要な役目を担い、東京臨海エリアを使った実証実験をこれまで繰り返し行なっていたというのが第2期になる。もちろん、東京だけでなく、国内の180ヶ所程度の規模でさまざまな目的をもって実証実験は行なわれてきている。

世界初となるレベル3車両の発売へ
そうした中、最大の課題は安全評価であり、カメラやレーダー、LiDARなどの情報を同時に評価するシミュレーションが必要であり、神奈川工科大学など複数の企業、団体のコンソーシアムが開発したDIVP(Driving Intelligence Validation Platform)というバーチャルで評価するソフトが製品化するところまで到達している。
こうしたことを経て市場化へのプロセスとして、まず2018年に内閣官房が自動運転に係る制度整備大綱を起こし、20年4月に道交法の一部改正を警察庁が行ない、また道路運送車両法の一部改正を国交省が行なっている。こうした改正を受け、2021年3月にホンダから世界初のレベル3車両が発売するに至ったわけだ。
一方で、国際連携・標準化活動としては、ダイナミックマップ関連では標準化団体OADF(Open Auto Drive Forum)にSIP-adusも参加し提案を検討している。また安全性評価のデフォルトスタンダートともう言うべきASAMという団体は、SIPのインターフェイスの提案を受け入れている状況もある。
こうしたSIPの9年間の活動報告と成果が報告され、産学官、国際、そして省庁における連携がかなり進んだと報告し、カーメーカーには競争領域を加速させるためにも協調領域の整備がある一定の貢献をすることができたと報告した。
金沢大学菅沼研究室の取り組み
会場では実際の自動運転の車両に体験試乗することができたので続けて報告しよう。まずは金沢大学の取り組みだ。
金沢大学菅沼研究室では、1998年から研究を始めており、現在はSIPの中で「ADアーバン」というプロジェクトを立ち上げている。これはカーメーカーの自動運転開発において、システムができないことを明確化したり、検証したりしている。つまりカーメーカーはシステムが「できない」という状況、課題は外部に漏れないようにしているため、課題解決の足枷になっている現状があるのだ。
そこで金沢大学では、メーカーの代わりにこうした課題があるということを集め、自工会を通じて共有し、場合によっては関係省庁に協力を仰ぐという活動をしているという。したがって実用化を目指すもののビジネス的な狙いとはベクトルの違う関わり方をしている研究室ということになる。
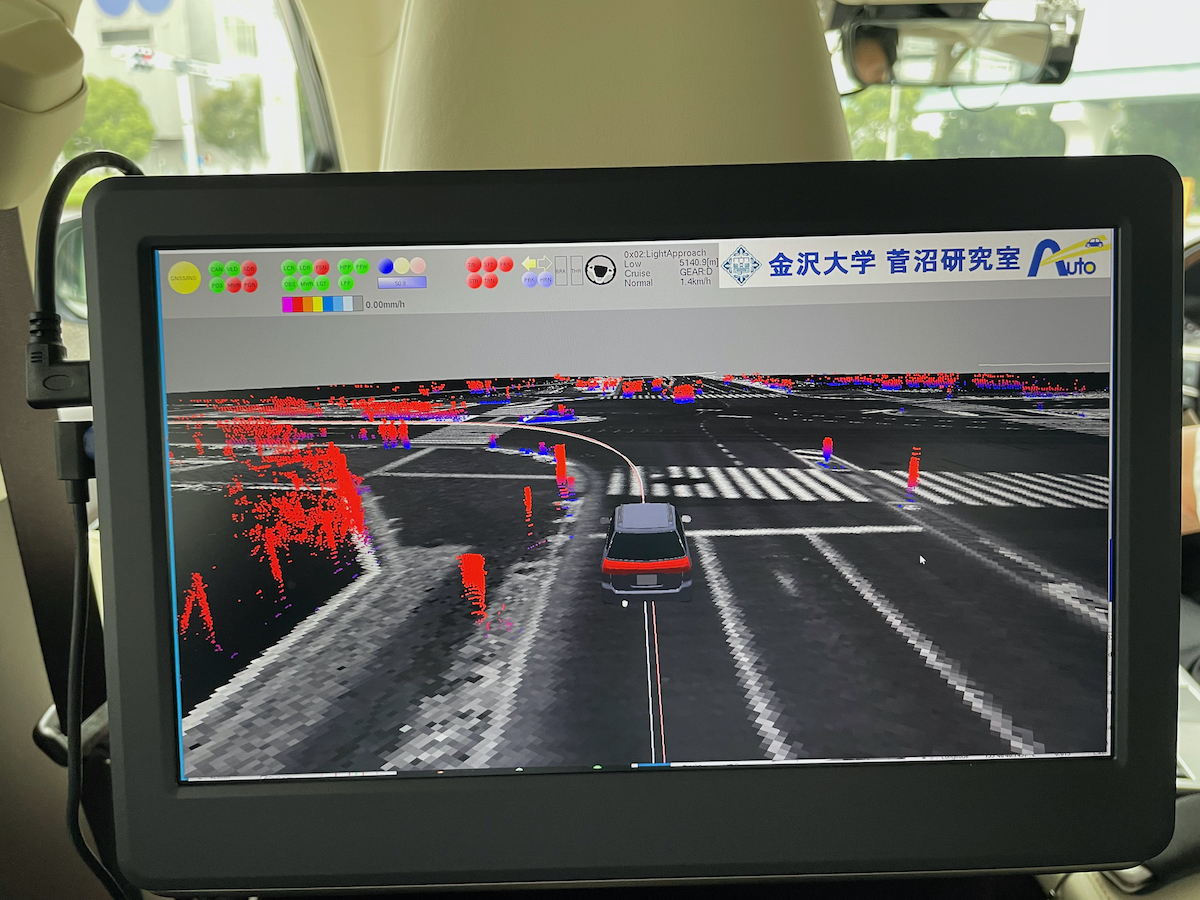
今回の試乗ではLiDAR、ミリ派レーダー、カメラ、そしてマイクを装備した車両で、V2Iの760MHzとセルラー(5G、4G)通信を使ってインフラ協調の有効性を評価している。ちなみに、マイクは救急車両のサイレンを認識するために使用している。今回は模擬車両の緊急車両を用意したというが、試乗中に遭遇することはなかった。また世界との協調領域ということで、周波数帯も5.9GHzを使用していく方向で調整することが総務省から発表されている。現在は放送用の周波数と近いことから干渉の課題があり、その調整に入るという情報があった。

話を戻すと、こうしたシステムによる「認知」がどこまで可能かという評価が今回、菅沼教授が説明したもので、信号機はカメラで認識するが認識しにくい環境、例えば、隠蔽レイアウト、逆光、夜間などでの実証実験では、複数台の信号機が設置されている場合は大きな課題にならないという評価になった。また交差点直前に信号が変わってしまい急ブレーキになるようなケースでは、信号の残秒数を提供してもらうことで対応できることなどが課題解決として評価された。まさに交通環境整備の領域だ。
そして自動運転はリアルな環境とDIVPの仮想空間とを重ね合わせて、限界性能はどこにあるのかといった検証を行なっている。DIVPであれば、現実にはない厳しい環境も作り出すことができ、検証することができたという。
自車位置の測位では大まかにGPSで測位し、カメラ、LiDAR、レーダーなどからの車線情報や物体情報などを高精度地図とすり合わせ、正確な自車位置を測位する方法がとられている。そして実際の試験走行では、こうしたセンサー類による認知は的確に行なわれており、認知を元に判断し、操作という流れにいおいて危険な場面に遭遇するようなことはなかった。
「TIER Ⅳ」社は過疎地域で自動運転の実用化を目指す
もう1社は「TIER Ⅳ」で、もともとベンチャーでスタートしたが、現在は会社組織になり、上場できるレベルにまで成長している有望企業だ。ここではジャパンタクシーから車両提供を受け、過疎地域での自動運転の実用化を目指す研究が進められている。

試乗車は、「Autowear」というオリジナルの自動運転ソフトを開発し、世界初のオープンソースとしている。車両にはLiDAR6個、GNSS(自己位置推定)1個、IMU1個(加速度・角度検知・自己位置推定)を搭載。
そしてカメラは物体認識用で6個、遠隔監視用で6個、信号認識用で2個を車載していた。また高精度3Dマップは、3次元点群+Lanelet2を使用し、自車位置測位して自動走行をする。
実際の走行試験では東京臨海エリアで右左折を含む、一般道で走行した。結果としてはまずAutowearの読み込みに時間がかかり、出発するまでの時間がかかったことがあったが、読み込まれれば特に問題はなさそうだった。気になるのは右折時の対向車や左折時の歩行者等の認識において、バッファ設定が長く、一般的な交通環境での使用には課題があるように感じたが、バッファ設定時間は任意なので特に課題にはならいだろう。ただ実用段階になれば重要なポイントになると考えられる。
これら自動運転の開発において認知、判断、操作という段階において認知についてはインフラ協調が必須条件であることが理解でき、判断においては高精度3Dマップと自車位置測位の重要性、そして操作においては乗り心地や不安にならない動きといったことの課題が見えてくる。
菅沼教授とTIER Ⅳ担当者のそれぞれに一般公道での課題をひとつ挙げてもらったところ、ともに路上駐車車両という回答だった。
停車しているのか駐車しているのかの認知が難しいということだ。こうしたことから走行するエリアのゾーニングといった整備課題も浮か上がり、徐々に実用化へのロードマップが進行していることが理解できる。
自動運転は一般公道で実現するにはかなり高いハードルが存在するものの、限られたエリア、例えば空港や港、トラックターミナルなどでは交通環境情報をコントロールすることが比較的容易であり、実現しやすい。そうした商用レベルでの実用はすでに始まってり、過疎地域での無人タクシーや無人バスなどの利用へ広がっていけば、人々に笑顔をもたらす交通環境へとシフトチェンジできることだろう。













